

Linkage wearable sixteen-degree-of-freedom driving end mechanical arm
A degree of freedom, active-end technology, applied in the field of robotics, can solve the problems of low degree of freedom, difficult to complete complex actions, complex operation and control, etc., to achieve the effect of increased freedom of operation, easy to operate, and flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
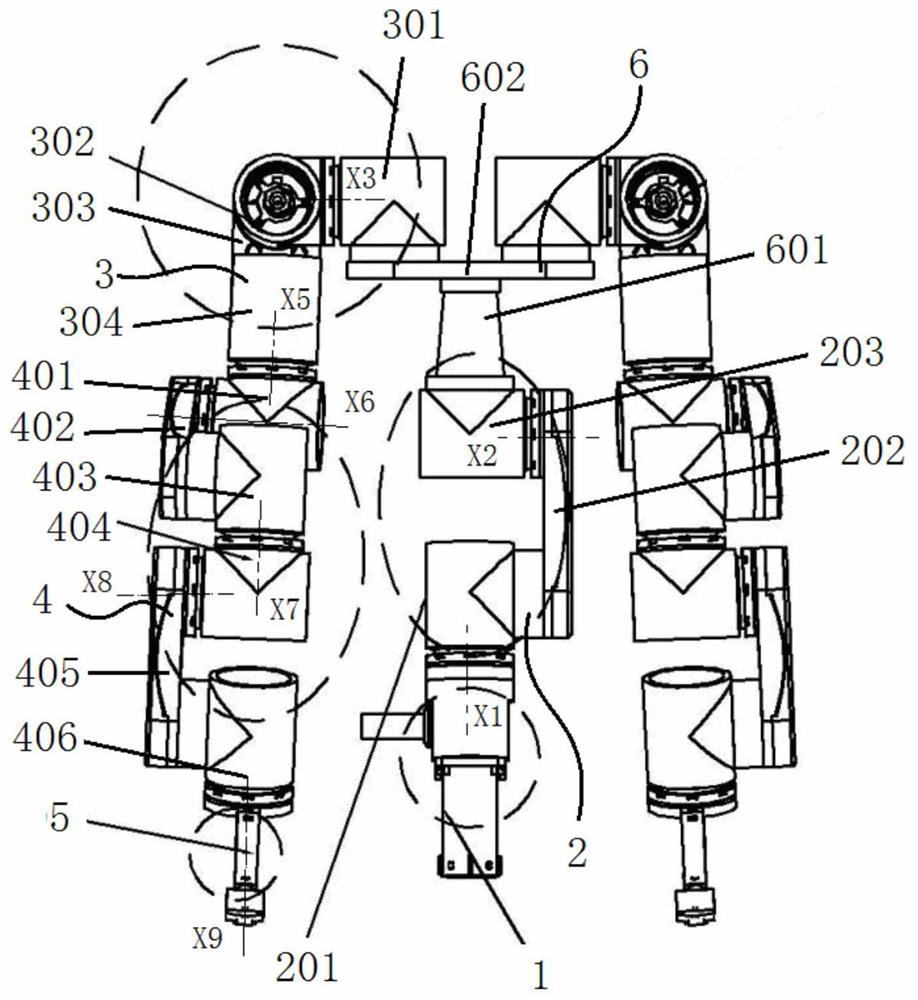
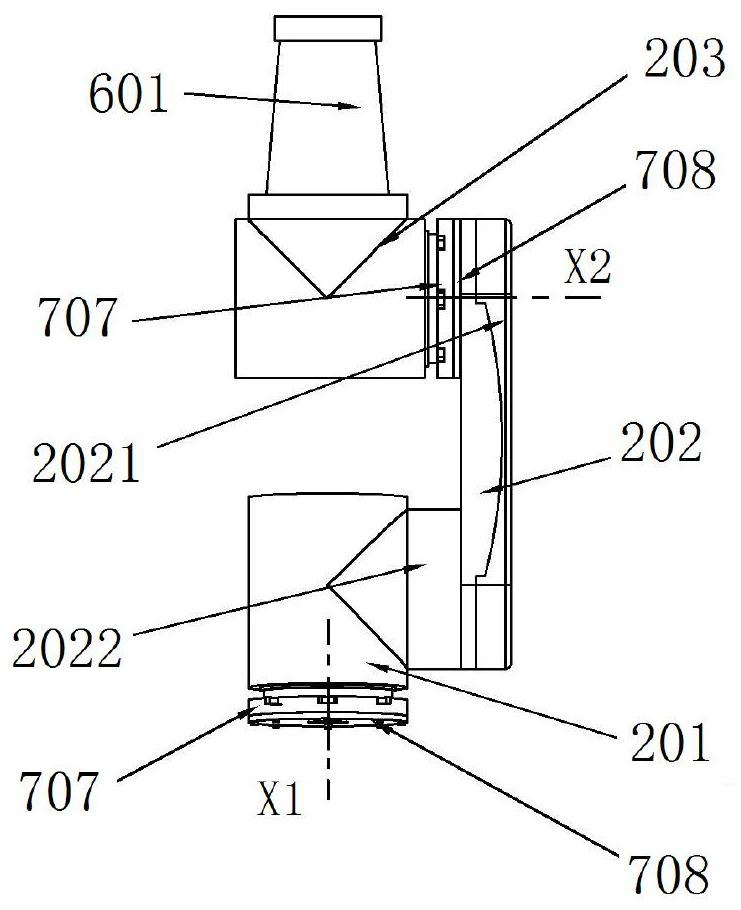
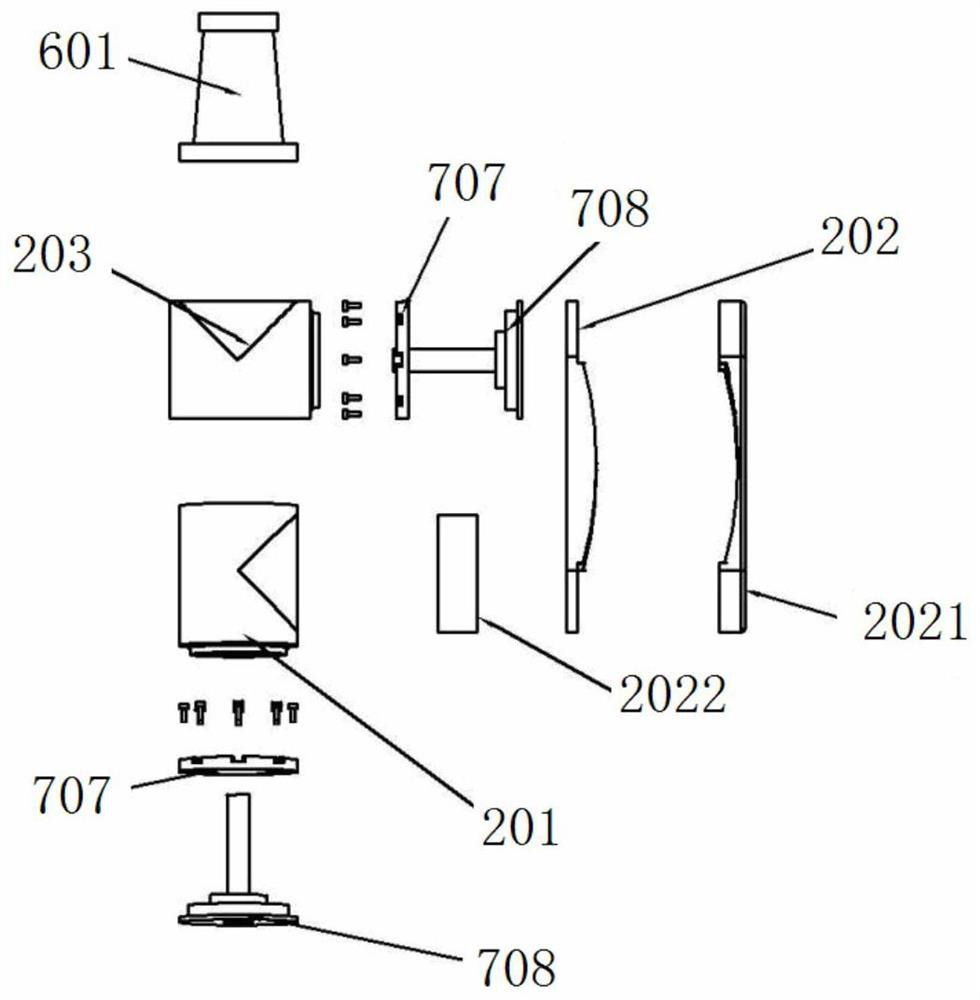
[0028] Such as Figure 1-10 As shown, the present invention includes a support 1, a waist assembly 2, a torso seat 6, a shoulder assembly 3, an arm assembly 4 and a joystick joint 5, wherein as Figure 2~3 As shown, the lumbar assembly 2 includes a first lumbar joint 201, a pitch connection joint 202, and a second lumbar joint 203. The first lumbar joint 201 is axially vertical and its lower end is connected to the support 1 in rotation around the X1 axis. One side of the first lumbar joint 201 is fixedly connected to the lower end of the pitch connecting joint 202, the second lumbar joint 203 is axially horizontal and one end is connected to the upper end of the pitch connecting joint 202 to rotate around the X2 axis, and the trunk seat 6 includes a T-shaped waist connecting column 601 and a shoulder connecting plate 602, and the upper side of the second wa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More