

Visual inertial navigation fusion SLAM method based on Runge-Kutta4 improved pre-integration
A pre-integration, visual technology, used in navigation, navigation, image analysis, etc. through velocity/acceleration measurement, which can solve problems such as poor performance, poor positioning accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
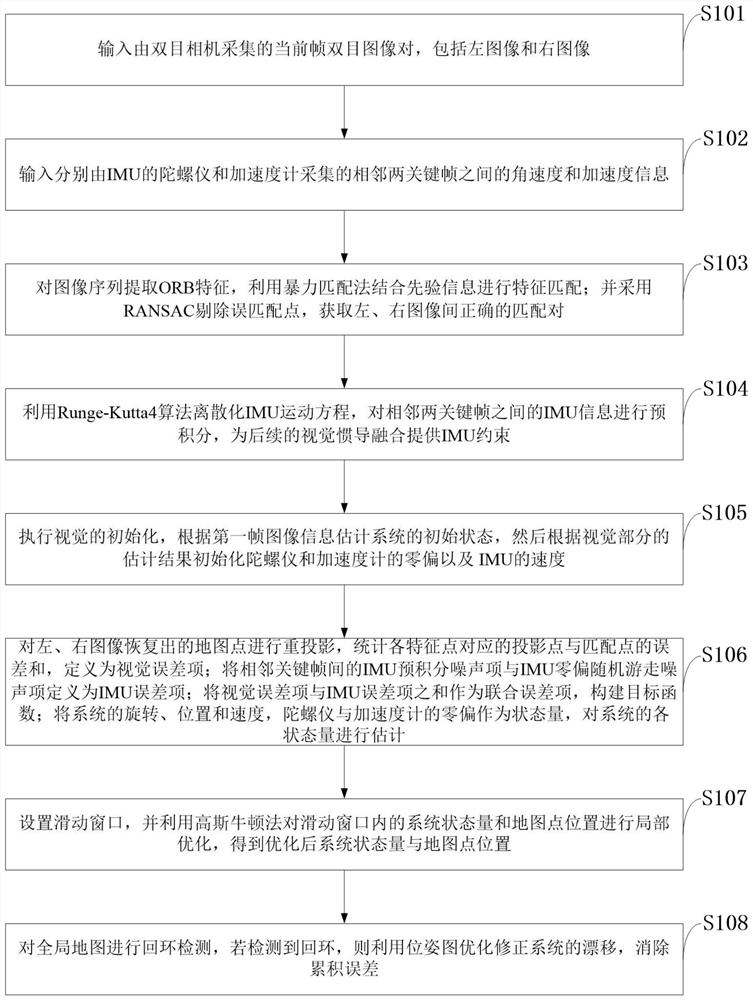
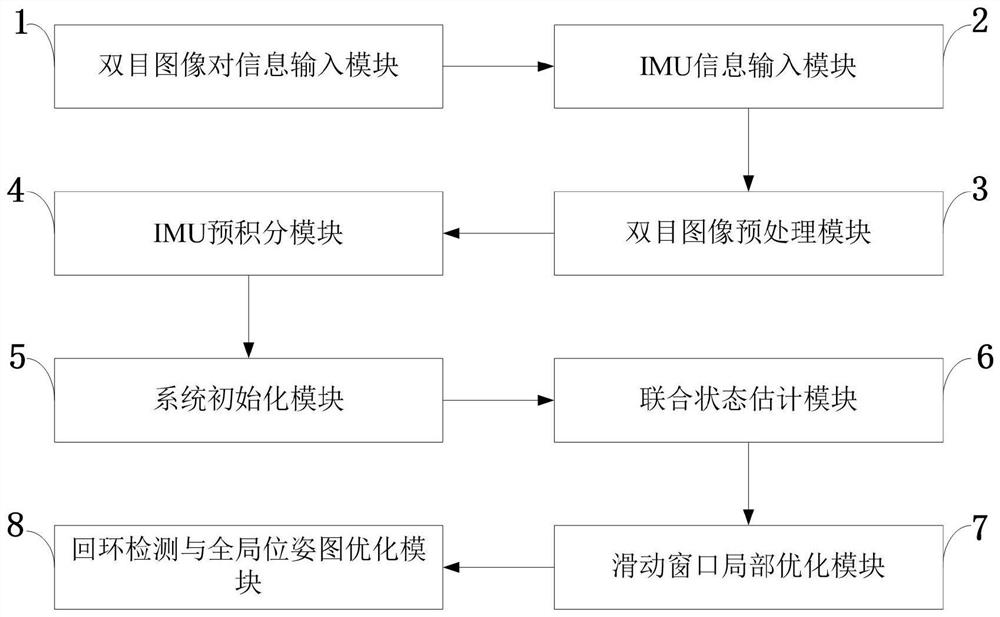
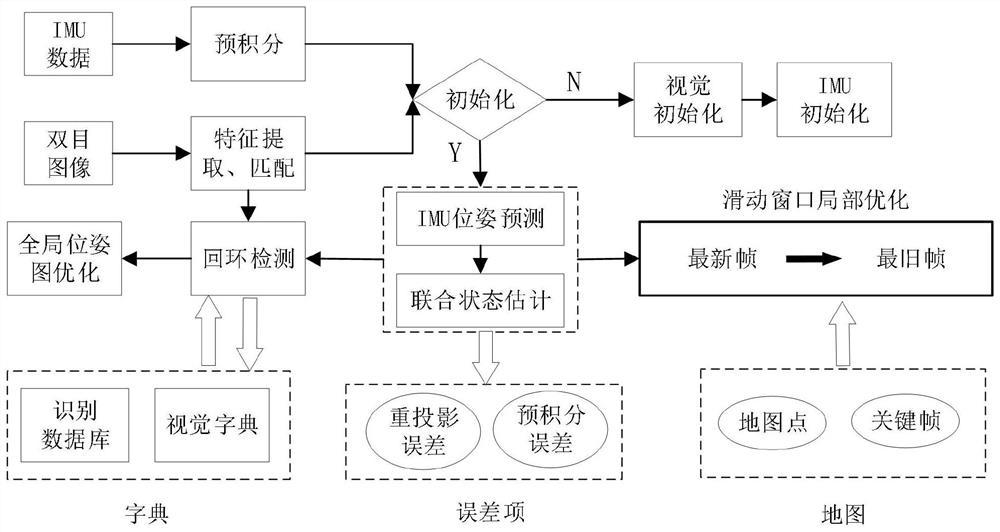
[0092] Aiming at the problems existing in the prior art, the present invention provides a visual inertial navigation fusion SLAM method based on Runge-Kutta4 improved pre-integration, which provides IMU constraints between two key frames through IMU pre-integration, and then minimizes the visual The sum of the reprojection error and the IMU pre-integration error estimates the system state, and finally optimizes the system state and map point locations within the sliding window. In order to improve the precision of the pre-integration stage, the present invention innovatively proposes to use the fourth-order Runge-Kutta algo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More