

Navigation method for correcting inertia angle of robot based on visual angle
A technology of visual angle and navigation method, applied in the field of navigation, can solve problems such as visual navigation angle jumps, offsets, and inertial navigation angle offsets, etc., so as to reduce the load of running memory, simplify the amount of calculation, and overcome offset errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
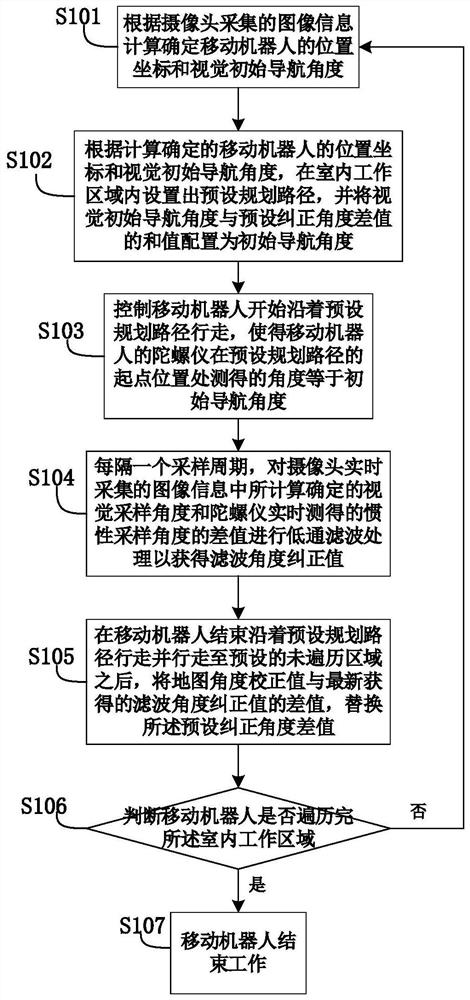
[0020] In order to solve the offset defect caused by the inertial navigation angle error increasing with time and the defect that the visual navigation angle is prone to jumps, the embodiment of the present invention combines the angle measured by the gyroscope and the angle obtained by the camera acquisition and calculation. Correct the situation where the trajectory of the robot will deviate when walking. The embodiment of the present invention discloses a navigation method for a robot to correct the inertial angle based on the visual angle, including:
[0021] Step 1, calculating and determining the position coordinates and the initial visual navigation angle of the mobile robot according to the image information collected by the camera of the mobile robot, representing the basic pose infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More