

Unmanned aerial vehicle control method and system based on multi-agent deep reinforcement learning
A multi-agent, reinforcement learning technology, applied in neural learning methods, control/regulation systems, vehicle position/route/altitude control, etc., can solve problems such as making appropriate strategies to speed up training and reduce response delays , to avoid the effect of delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] Explanation of terms:
[0048] Computation offloading: Computation offloading is the transfer of resource-intensive computing tasks to separate processors (such as hardware accelerators) or external platforms (such as cloud servers, edge servers). Offloading to a coprocessor can be used to accelerate applications, including image rendering and mathematical calculations. Offloading computation to external platforms over the network can provide computing power and overcome hardware limitations of devices, such as limited computing power, storage, and energy.
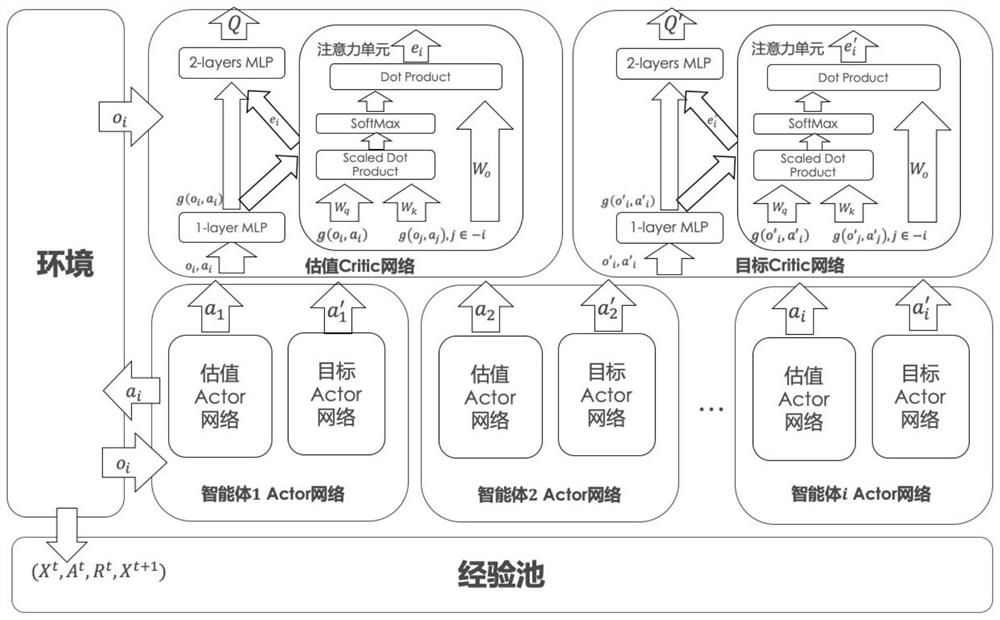
[0049] Multi-agent deep reinforcement learning (Multi-agent deep reinforcement learning): In a multi-agent system, each agent learns to improve its strategy by interacting with the environment to obtain a reward value (reward), so as to obtain the best process of optimal strategy.
[0050] Attention mechanism: The attention mechanism in deep learning is essentially similar to the selective mechanism of human being...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More