Method and device for extracting high-precision map elements
An extraction method and high-precision technology, applied in the field of high-precision map production, can solve problems such as high computational complexity, low accuracy, and high labor costs, and achieve the effects of enriching features, speeding up speed, and improving geometric accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0022] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples are only used to explain the present invention, but not to limit the scope of the present invention.
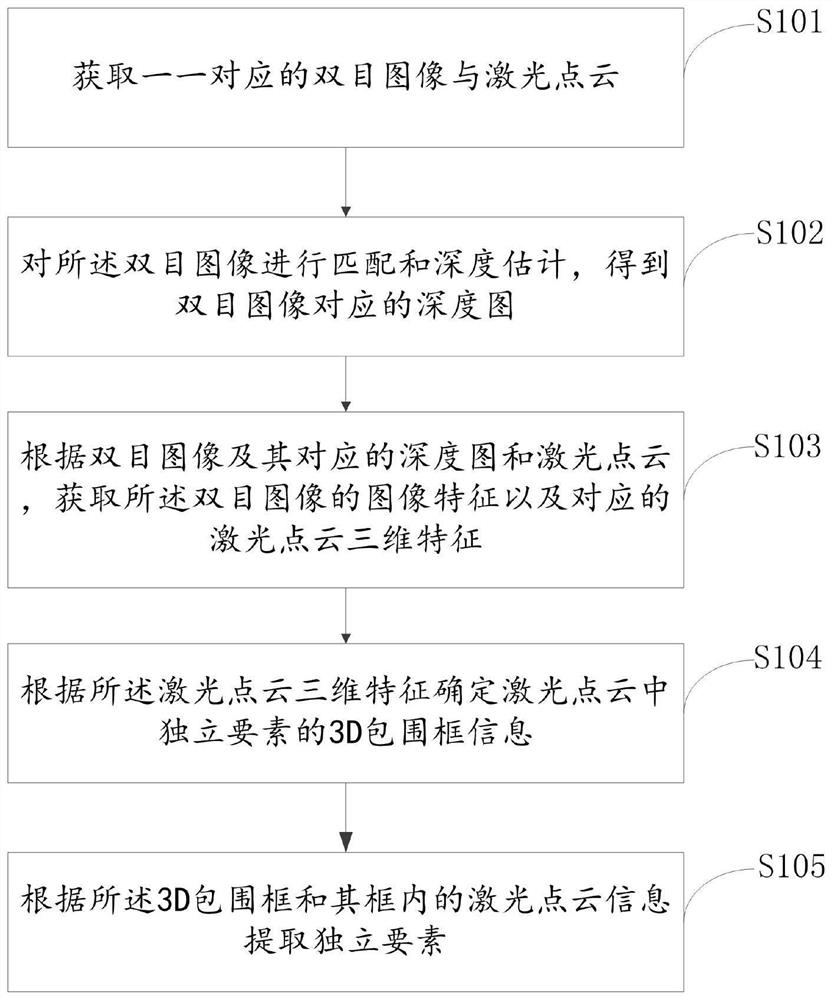
[0023] refer to figure 1 and image 3 , in the first aspect of the present invention, a method for extracting high-precision map elements is provided, which is characterized in that it includes the following steps: S101. Obtaining a one-to-one correspondence of binocular images and laser point clouds; S102. Image matching and depth estimation are performed to obtain a depth map corresponding to the binocular image; S103. According to the binocular image and its corresponding depth map and laser point cloud, obtain the image feature of the binocular image and the corresponding three-dimensional feature of the laser point cloud ; S104. Determine the 3D bounding box information of the independent elements in the laser point cloud accordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com