

A method and system for multi-machine cooperative positioning accuracy optimization
A technology of collaborative positioning and optimization methods, applied in positioning, radio wave measurement systems, instruments, etc., can solve the problems of pseudo-code synchronization error system delay error, large error, and low positioning accuracy, and achieve multi-dimensional optimization of distance and phase Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with drawings and embodiments.
[0028] The multi-machine cooperative positioning accuracy optimization method provided by the present invention includes the following steps.
[0029] Step S1: Set up multiple airborne nodes, use the airborne nodes to generate a TDOA matrix, and obtain the positioning hyperbolic equation based on the matrix, and then solve it to obtain the coordinate value of the target position.
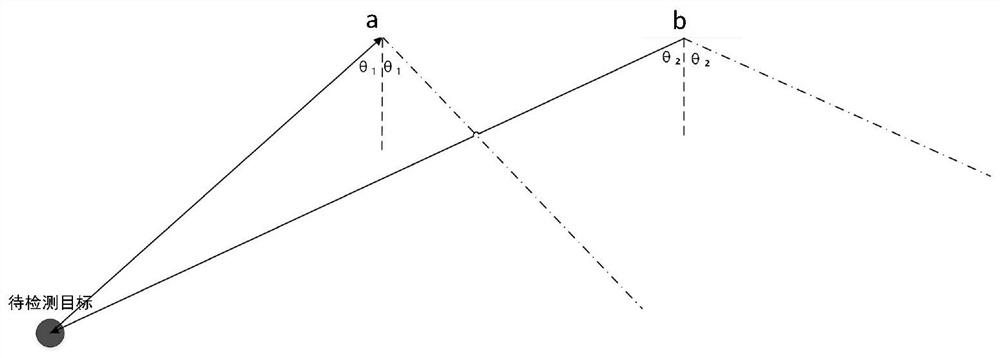
[0030] Specifically, this embodiment provides four airborne nodes, including one airborne central node and three airborne common nodes. combine figure 1 , all helicopter nodes in the network can independently complete ranging and direction finding, and at the same time, central node a and ordinary node b can switch to each other according to the central node election strategy. The central node in the network is mainly responsible for the timing function of ordinary nodes and search and resc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More