

Intelligent vehicle local path planning method in structured environment
A technology for local path planning and intelligent vehicles, which can be used in road network navigators, measuring devices, instruments, etc., and can solve problems such as poor adaptability, low planning efficiency, and collisions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0089] The technical scheme that the present invention solves the problems of the technologies described above is:
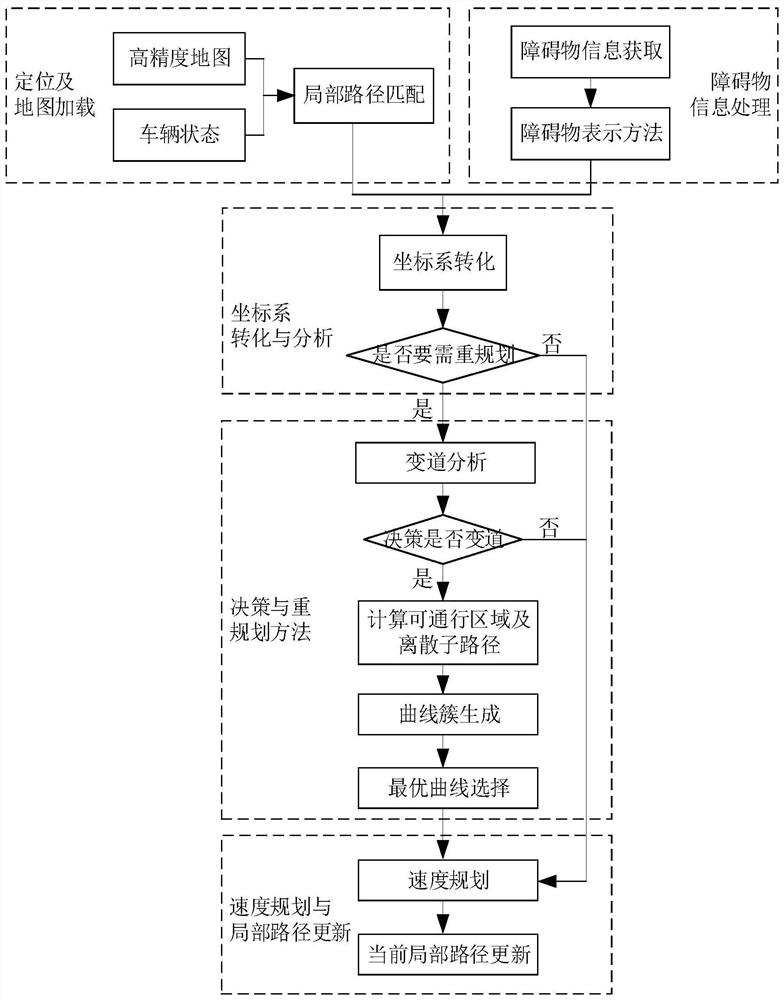
[0090] Such as figure 1 A local path planning method in a structured environment specifically includes the following steps:
[0091] 1. Positioning and map loading. Including the following sub-steps:
[0092] (1) Obtain high-precision maps and vehicle status information;
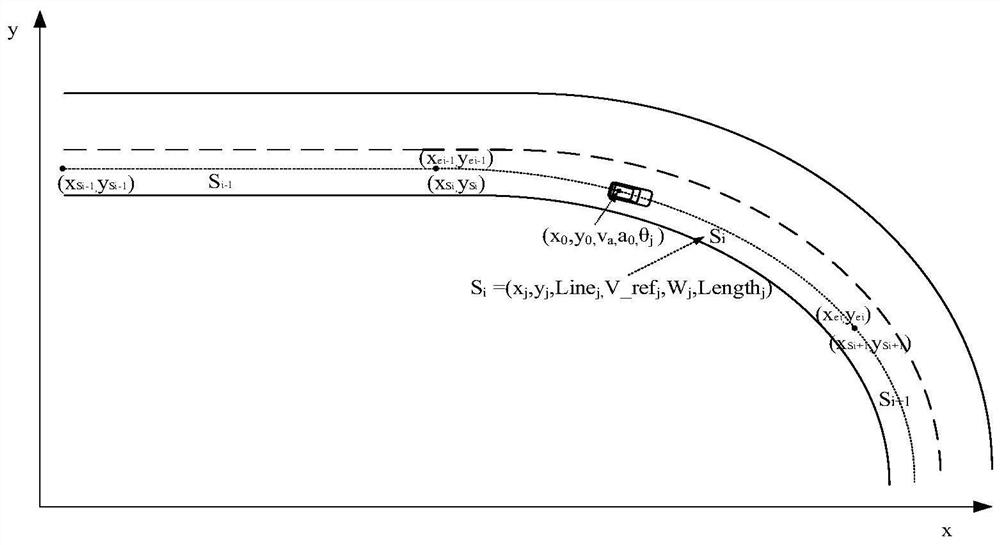
[0093] The high-precision map data contains the global path segment of the current driving route, and the symbol is expressed as S={S 1 ,S 2 ,S 3 ,…S k}, that is, the global path consists of k global subpath segments S i Poses, S i =(x j ,y j ,Line j , V_ref j ,W j ,Length j ), the global subpath contains t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More