Lower limb rehabilitation training exoskeleton robot and control method thereof
An exoskeleton robot and rehabilitation training technology, applied in muscle training equipment, gymnastics equipment, passive exercise equipment, etc., can solve problems such as bulky structure, high joint stiffness, and rigid movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
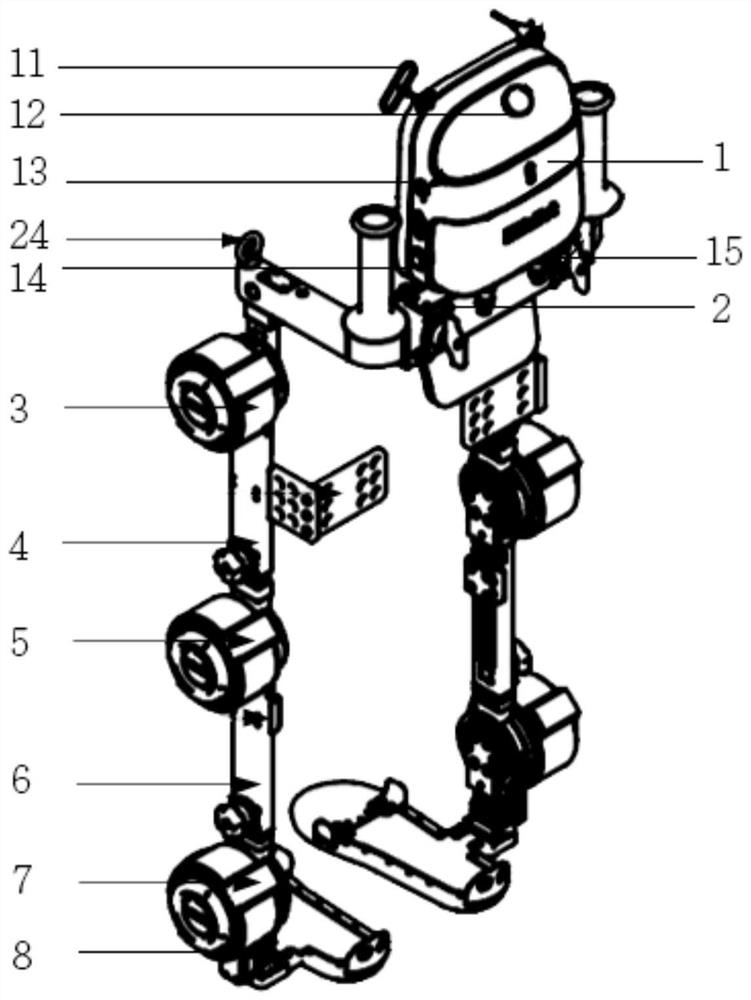
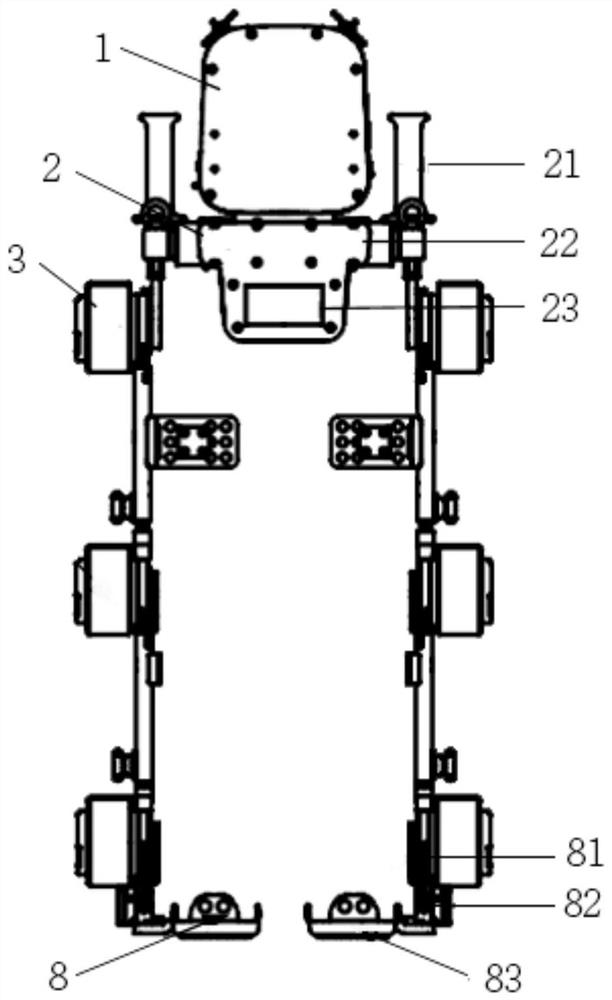
[0043] In order to make the objects, features and advantages of the present application more clearly understood, the present application will be described in further detail below with reference to the accompanying drawings and specific embodiments. Obviously, the described embodiments are some, but not all, embodiments of the present application. Based on the embodiments in the present application, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of the present application.
[0044] It should be noted that any embodiment of the present application is used for lower limb rehabilitation training for patients with limb dysfunction. Patients with limb dysfunction need to regularly perform a large number of rehabilitation training to maintain the basic functions of the limbs. The lower limb rehabilitation exoskeleton robot is due to nerve damage. A safe and effective walking training platform is provided for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More