

Unmanned aerial vehicle target tracking method and device and unmanned aerial vehicle
A technology for tracking targets and UAVs, applied in the field of UAV target tracking, which can solve the problems of poor target tracking effect and achieve the effect of improving the tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
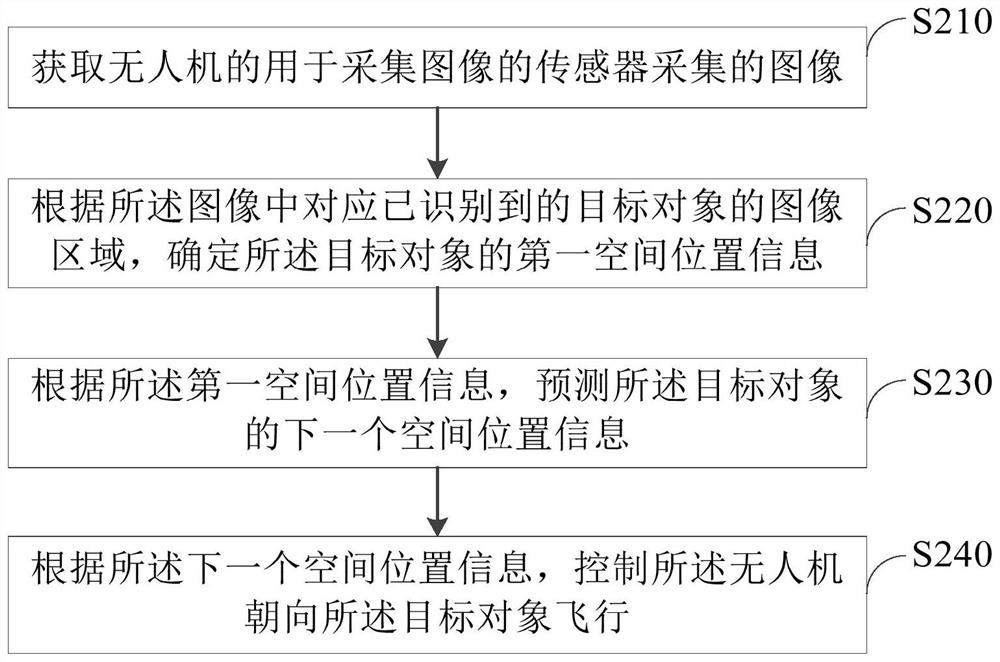
[0035] figure 2 is a schematic flowchart of a method for tracking a target by a drone according to an embodiment. In this embodiment, the method for tracking a target by a UAV may include the following steps S210-S240.
[0036] Step S210, acquiring an image collected by a sensor of the drone for collecting images. For example, the image may be an image collected by the photoelectric pod 401 described above.
[0037] Step S220: Determine the first spatial position information of the target object according to the image area corresponding to the recognized target object in the image.
[0038] In detail, the target object to be tracked can be identified according to the image collected by the sensor, and the target object can be locked after the target object is identified. And, based on the image corresponding to the recognized target object, combined with the image collected by the sensor after the target object is recognized, the target object is tracked.
[0039] In this...
Embodiment 2
[0066] Based on the content disclosed in Embodiment 1 above, in the process of realizing the tracking target of the UAV, the UAV can also locate itself. In one example, please refer to Figure 4 , The method for tracking a target by a UAV may further include the following steps S410-S440.
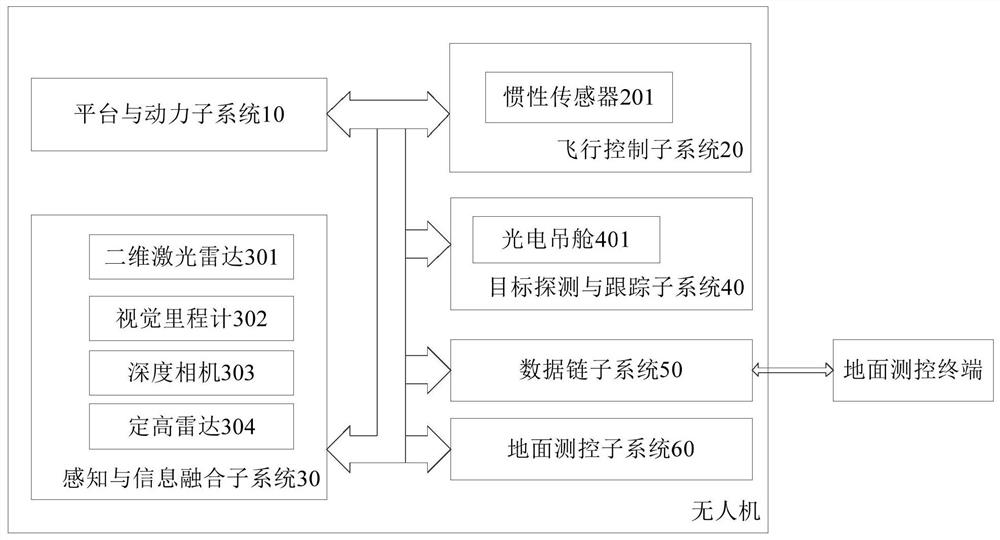
[0067] In one embodiment, taking the underground garage environment as an example, in the underground garage environment, the UAV can use the inertial sensor 201, the two-dimensional laser radar 301, the visual odometer 302, the depth camera 303, and the fixed height radar 304 to perform multiple Sensor fusion positioning. Among them, the schematic diagram of the interactive interface of the UAV autonomous positioning software can be as follows: Figure 5 shown.
[0068] Such as Figure 5 As shown, ROS can be installed in the above-mentioned airborne computer, and ROS can be equipped with laser height determination driver package, laser radar driver package, camera driver package and MA...
Embodiment 3
[0100] Based on the content disclosed in Embodiment 1 above, in the process of realizing the UAV tracking the target, the UAV can also fly with obstacle avoidance. In one example, please refer to Figure 6 , the above step S240 may include the following steps S610-S640. The unmanned aerial vehicle can perform the step of obstacle avoidance flight and the step of target tracking respectively and simultaneously.
[0101] Step S610, constructing a first map of the space environment where the UAV is located.
[0102] It can be based on the starting position (such as the spatial position of the UAV) and the destination position of the UAV obstacle avoidance mission, combined with the perception of each sensor on the UAV (such as the above-mentioned two-dimensional laser radar 301, visual odometer 302, etc.) The acquired environmental data is used to build a map of the space environment where the UAV is located. Among them, the spatial position of the UAV can be determined accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More