

Threat factor introduced heuristic unmanned aerial vehicle swarm flight path planning method
A trajectory planning, aircraft swarming technology, applied in the field of optimal path calculation planning and generation, can solve problems such as the optimal solution of the trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
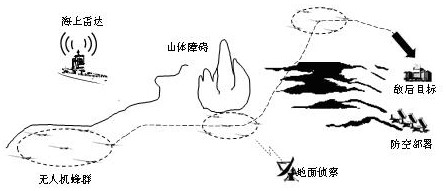
[0017]The present invention provides a UAV swarm trajectory planning method based on a heuristic algorithm. This method is different from other trajectory planning methods in that obstacles or enemy threats in the drone swarm formation flight area The deployment is introduced into the cost algorithm in a quantified form, so that the trajectory path searched by this method finds the optimal balance among the constraints of minimum flight cost and maximum flight safety.
[0018]The specific embodiments of the present invention will now be described in further detail. It mainly includes the following steps:
[0019]1) Before implementing trajectory planning, clarify the latitude and longitude coordinates of the departure point and flight destination of the drone swarm formation, and obtain the positions of obstacles and enemy threats in the flight path through reconnaissance and terrain observation.figure 1 Shown
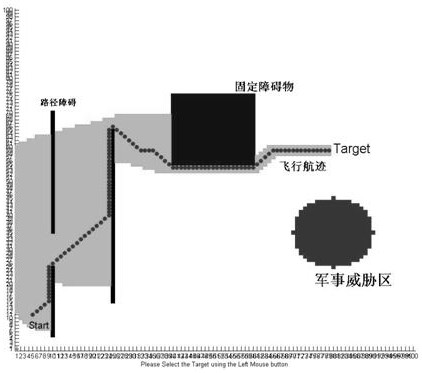
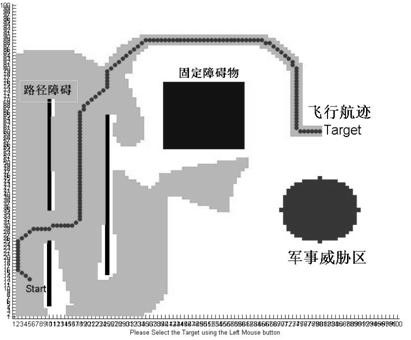
[0020]2) According to the obtained obstacles and threat area coordinates, use la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More