

Deformation-controllable bionic joint based on friction effect, and preparation method and application of deformation-controllable bionic joint
A technology of bionic joints and friction effects, applied in the field of structural bionics, can solve problems such as complex structures, poor compatibility of human body structures, and inability to meet the needs of multi-stage deformation, and achieve the effect of low cost, simple materials, and high forming accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
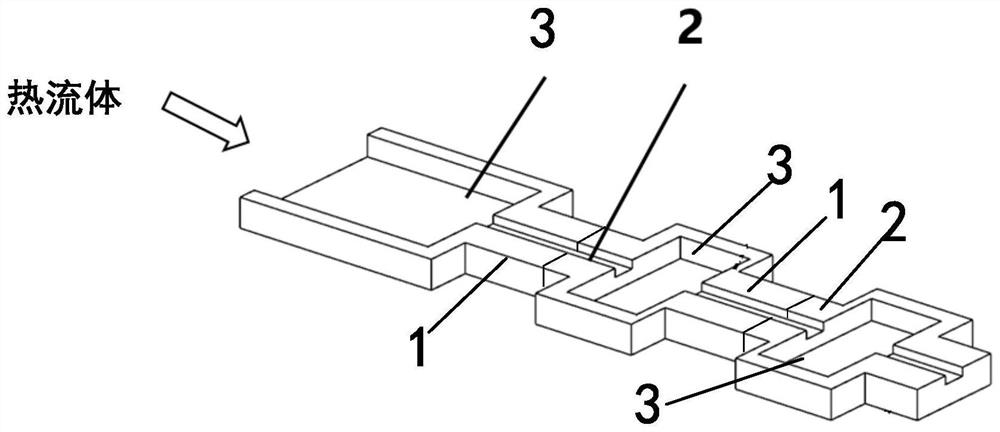
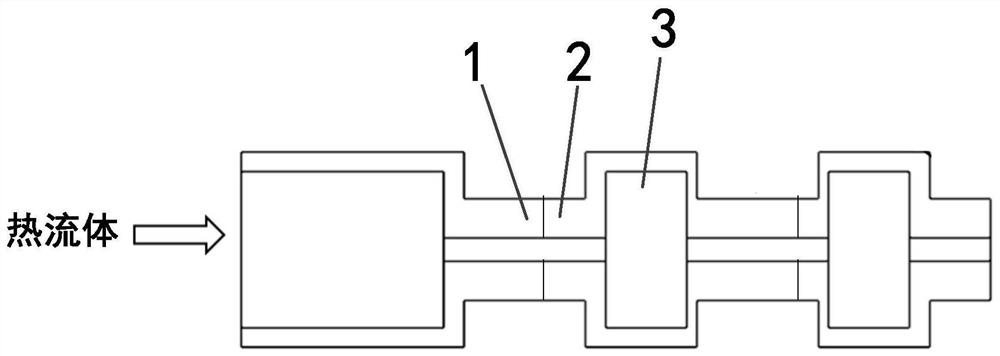
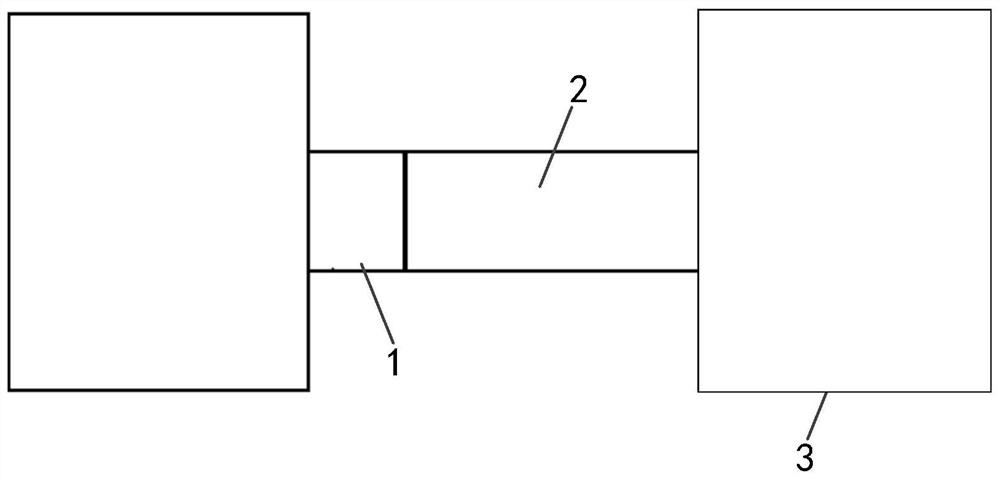
[0041] The embodiment of the present disclosure is the bionic of the elbow joint of the arm. Since the elbow joint is a straight section connected to a curved section and then connected to a straight section, a set of heating section, deformation section and cooling section can be used. The length of the heating section is the length of the forearm of the arm, and the length of the cooling section is the length of the forearm of the arm. The internal fluid is water, and the material of the deformation section is NiTi shape memory alloy. Since the phase transition temperature of NiTi shape memory alloy varies greatly with the composition ratio and process parameters, the deformation critical temperature of the material is taken as 80°C (specifically The value is determined by the composition ratio and process parameters). Comprehensively consider the influence of the pipe diameter on the unit temperature rise and the initial water temperature, for example, the pipe diameter is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More