

Semantic vision SLAM method based on probabilistic grid filtering
A grid and probabilistic technology, applied in the field of semantic visual SLAM, can solve problems such as dynamic target interference and achieve accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048]In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
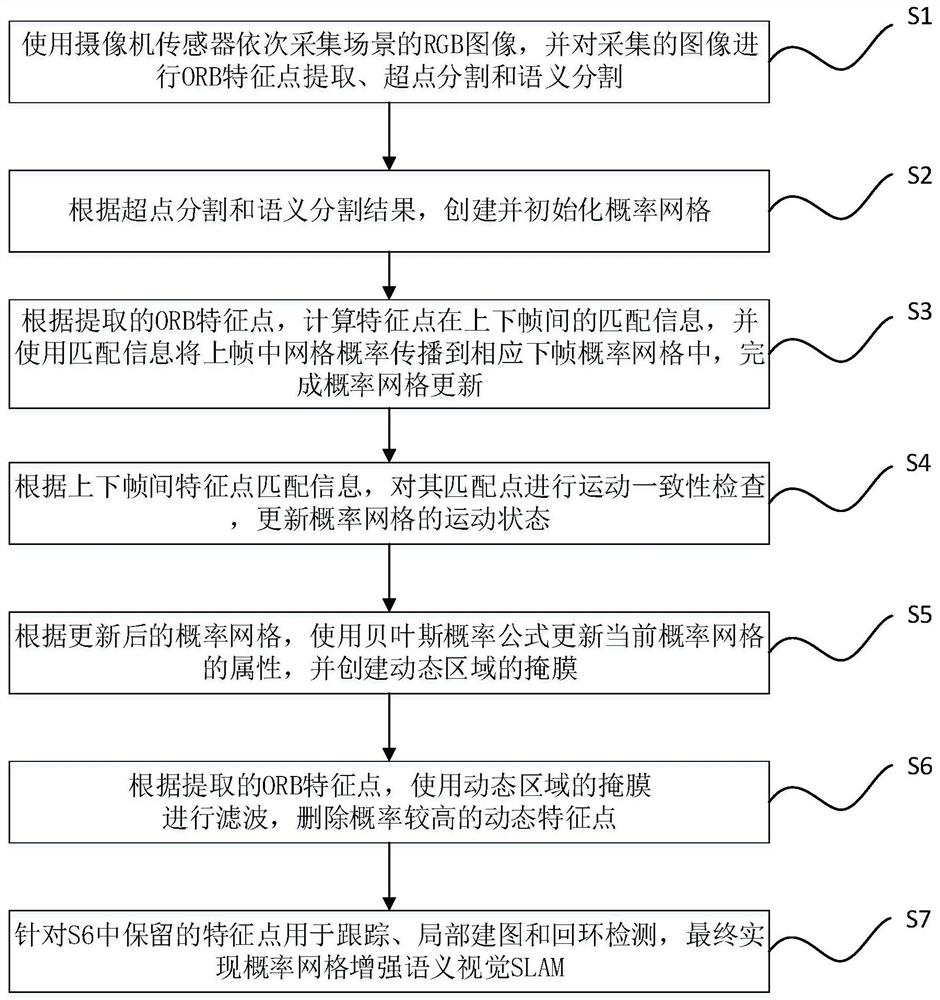
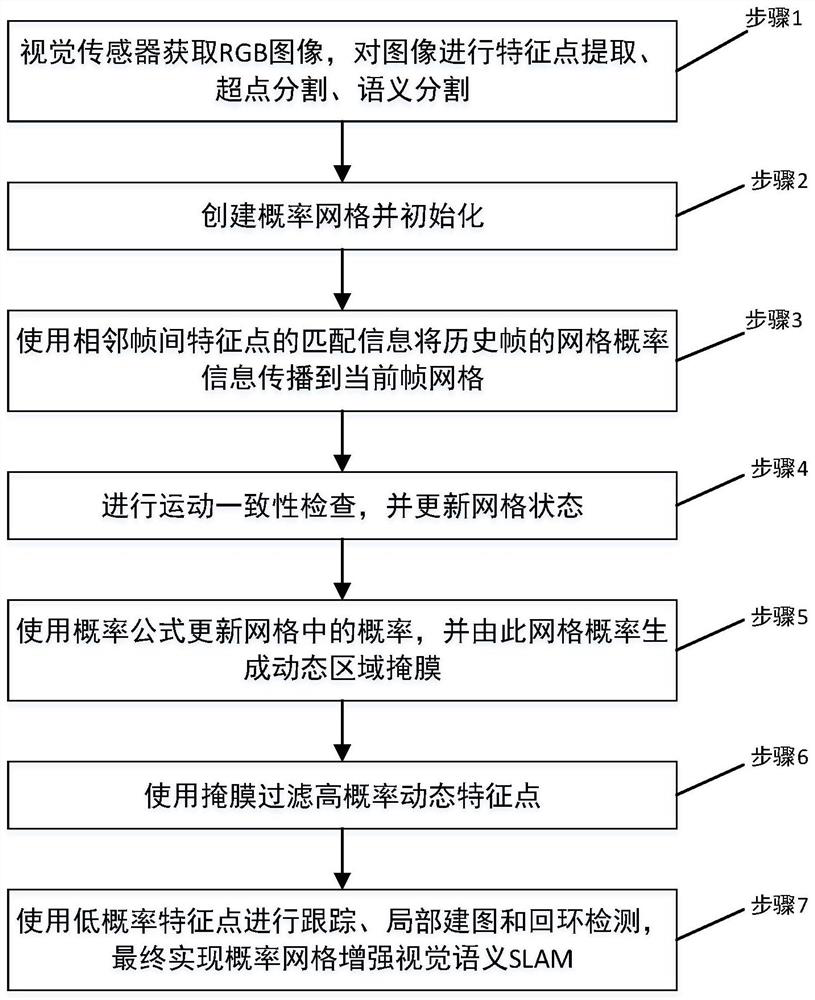
[0049] like figure 1 Shown, the semantic visual SLAM method of the present invention based on probabilistic grid filtering comprises the following steps:
[0050] S1, use the camera sensor to sequentially collect RGB images of the scene, and perform ORB feature point extraction, super point segmentation and semantic segmentation on the collected images;
[0051] S2. Create and initialize a probability grid for the superpoint segmentation and semantic segmentation results in S1;
[0052] S3. For the ORB feature points extracted in S1, calculate the matching information of the feature points between...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More