

Visual tracking method for mobile robot
A mobile robot and visual tracking technology, applied in the field of visual tracking, to achieve the effect of reducing the amount of calculation, reducing the identity jump, and reducing the search area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
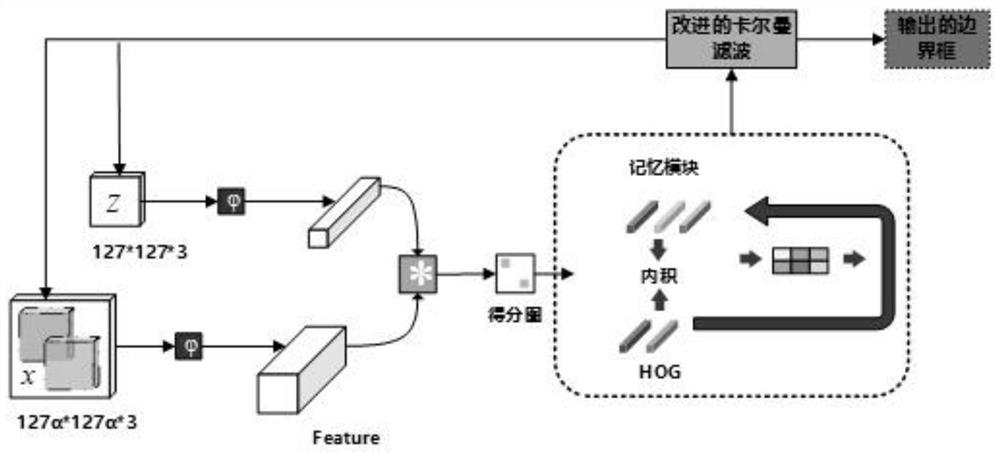
[0038]1. Design an algorithm based on HOG feature similarity calculation (HM-Siam), which follows the general SiamFC tracking framework, that is, the problem of tracking any target is regarded as a similarity problem. A function f(x,y) is used to compare the similarity between the sample image x and the search image y. If the two images describe the same object, return a high score, otherwise return a low score. Among them, x is the initial template image of the target person, and z is a group of images (z≥2) captured in real time by the next frame camera. But SiamFC only uses the features in the last layer to generate the final Score Map, which are robust to noise but lack the detailed information of the target, so their discrimination is not high enough.
[0039] The appearance information of an object is always a powerful prior knowledge to characterize an object. Therefore, a model based on color statistics can provide powerful information for the visual tracking problem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More