Compact endoscope surgical robot end driving structure
A surgical robot and driving structure technology, applied in the field of medical devices, can solve the problems of the auxiliary operation speed and auxiliary operation effect affecting the doctor, the limitation of the operation space of the mechanical arm, and the multi-space, etc., so as to reduce mutual interference, reduce the structure space, The effect of reducing the footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Below in conjunction with accompanying drawing, the present invention will be further described as follows:
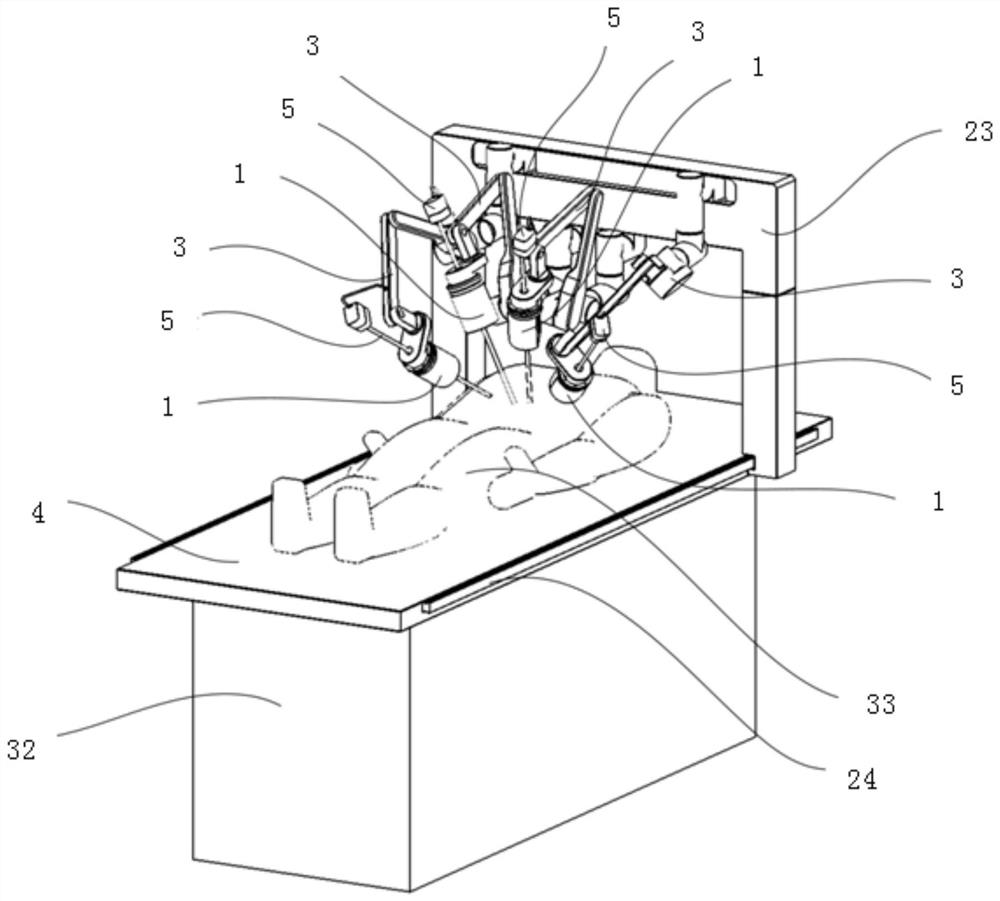
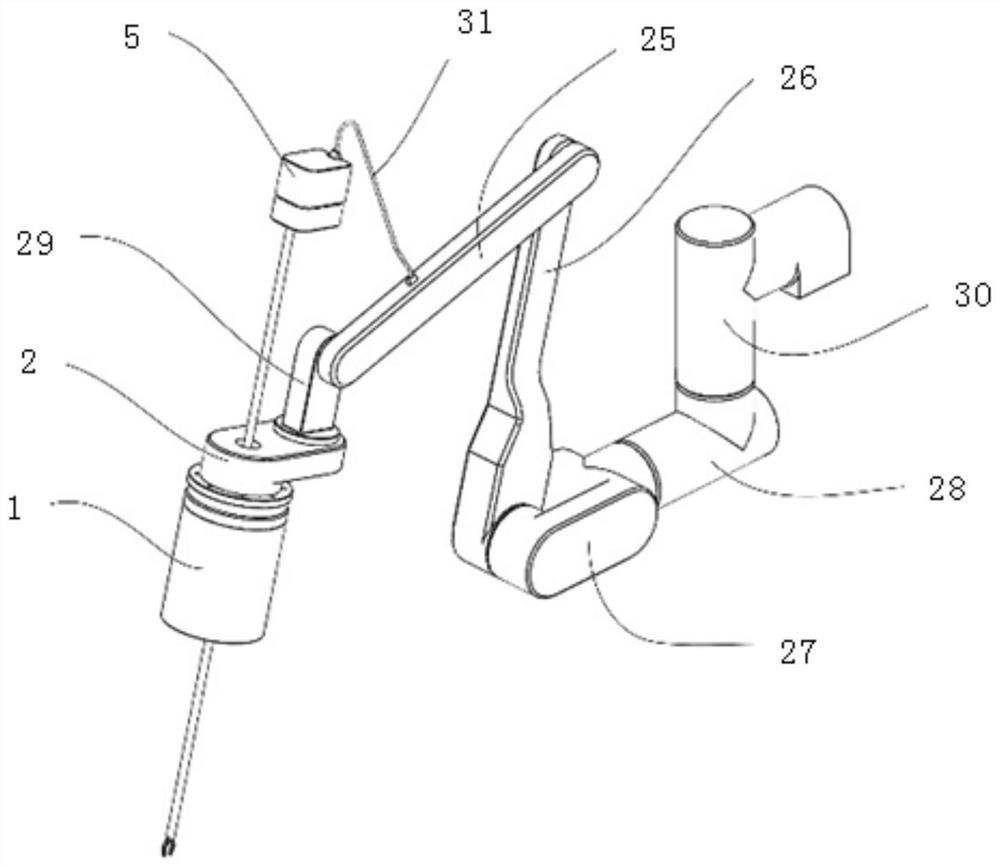
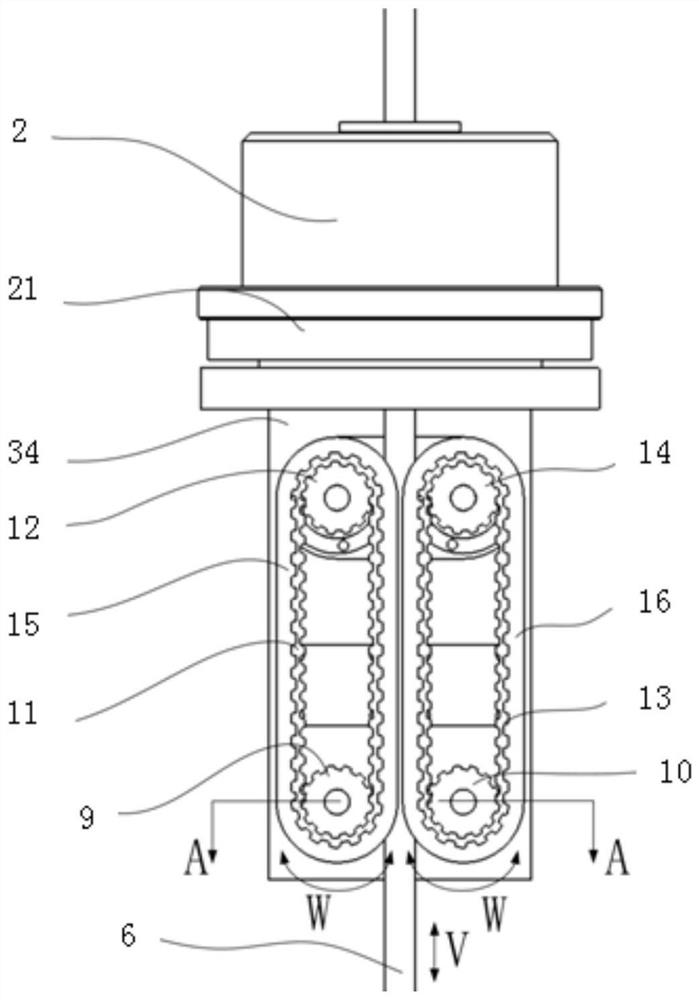
[0019] The present invention provides a compact endoscopic surgical robot terminal drive structure, including a surgical terminal drive mechanism 1, the surgical terminal drive mechanism 1 is installed on the drive mechanism base 2, the drive mechanism base 2 is installed at the end of the mechanical arm 3, the mechanical arm 3 is set above the bed board 4, the operating end driving mechanism 1 is connected to the surgical instrument 5, and the slender rod 6 of the surgical instrument 5 passes through the middle channel of the operating end driving mechanism 1, and the operating end driving mechanism 1 includes a linear motion mechanism and a rotary motion mechanism, The slender rod 6 of the surgical instrument 5 performs linear motion and rotary motion driven by the linear motion mechanism and the rotary motion mechanism.
[0020] as attached image 3 And atta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com