

Sparse point cloud multi-target tracking method fusing spatio-temporal information
A sparse point and point cloud technology, applied in the field of 3D vision, can solve problems such as low precision and insufficient information utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention proposes a sparse point cloud multi-target tracking method that integrates spatio-temporal information, which will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
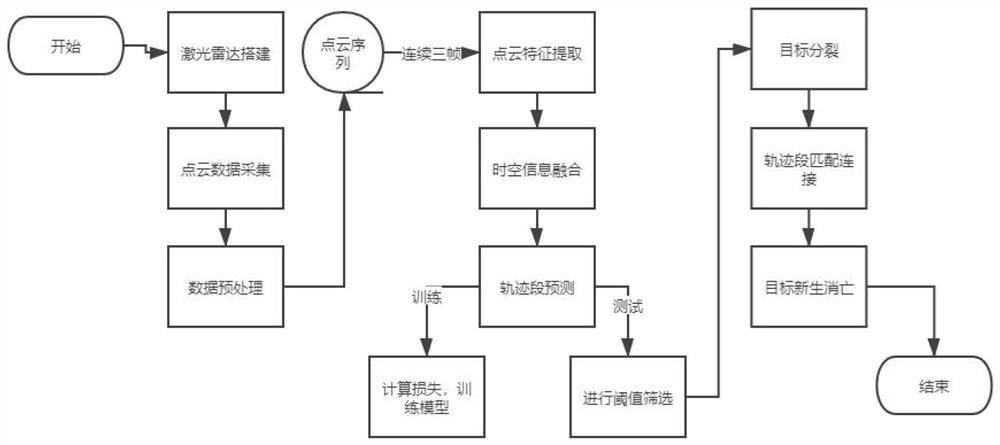
[0064] The present invention proposes a sparse point cloud multi-target tracking method that integrates spatio-temporal information. The overall process is as follows: figure 1 shown, including the following steps:
[0065] 1) Obtain the point cloud training set, use the point cloud training set to train the 3D point cloud trajectory segment prediction deep learning network, and obtain the trained 3D point cloud trajectory segment prediction deep learning network; the specific steps are as follows:
[0066] 1-1) Obtain the point cloud training set; the specific steps are as follows:
[0067] 1-1-1) Set up a lidar at any place around the edge of the fixed scene (it can be any model, this example uses Livox Mid-100 lidar), so t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More