

Camera calibration method based on human body posture estimation in large scene
A technology of human body posture and camera calibration, applied in computing, image data processing, instruments, etc., to achieve the effect of easy implementation, good convergence effect, and reduced complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The detailed implementation of the present invention will be described in detail below according to the accompanying drawings.
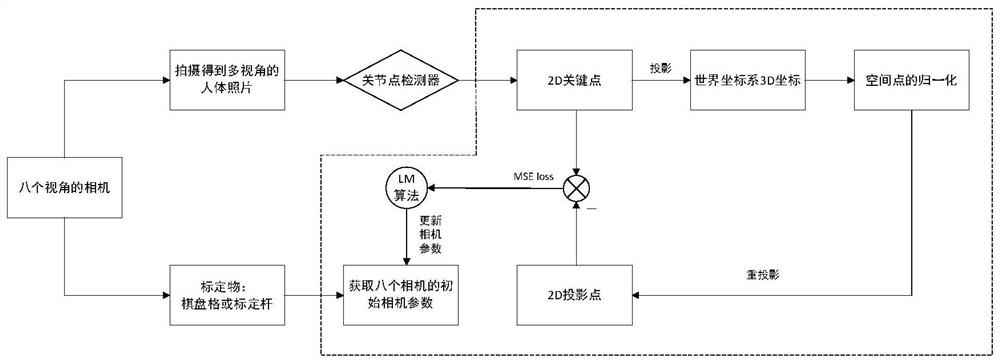
[0040] like figure 1 As shown, the camera calibration method based on human body pose estimation under the large scene of the present invention specifically includes the following steps:
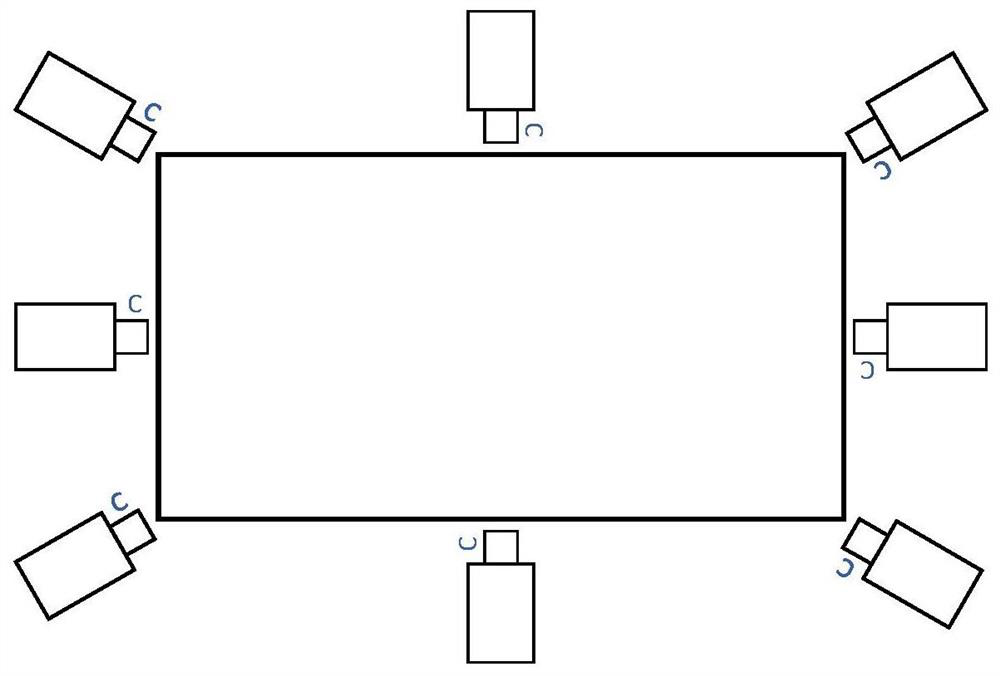
[0041] Step 1. First, you need to build a multi-view camera platform for the production of multi-view human body datasets and the initialization of camera parameters. The multi-view camera platform can be built in an open field outdoors. In this embodiment, a camera system with eight viewing angles is built in eight directions on the edge. For details, please refer to figure 2 form.
[0042] Step 2, in the built camera system, first place a calibration rod, and use Zhang Zhengyou's one-dimensional calibration method to initialize the parameters of the eight cameras. In this embodiment, one end of the calibration rod is first fixed, and an intermediate po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More