

A bionic jumping leg using pneumatic tandem elastic joints
A technology of series elasticity and joints, applied in the field of bionic robots, can solve problems such as difficulty in obtaining jumping performance, lack of landing energy storage structure, high peak power, etc., achieve excellent jumping performance, achieve lightweight, and avoid weakening effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
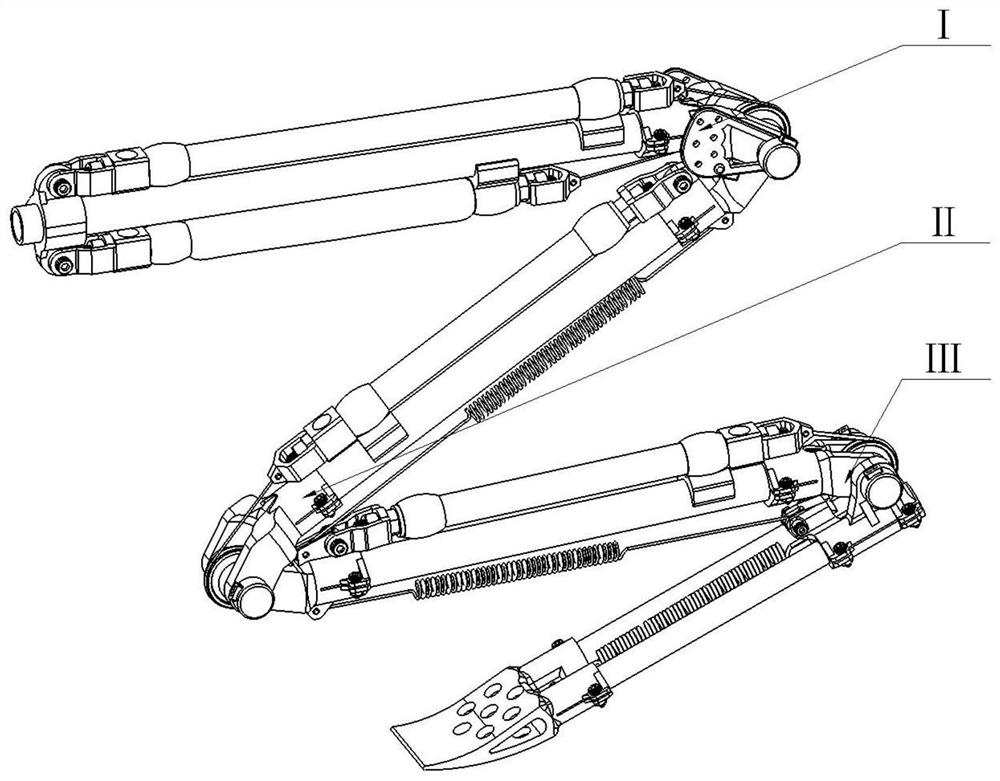
[0036] see Figure 1 to Figure 6 , a bionic jumping leg using pneumatic series elastic joints, which is composed of a hip joint module I, a knee joint module II, and a pneumatic series elastic ankle joint module III, characterized in that: the hip joint module I, the knee joint module II, the pneumatic joint module I The series elastic ankle joint module III is hinged in sequence from top to bottom. There are 4 pneumatic artificial muscles 11, 17, 36, 66 or 52 driving 3 joints to rotate, and angular displacement sensors are arranged at the 3 active joints respectively.
[0037]This embodiment adopts a bionic jumping leg with pneumatic series elastic joints, which has the advantages of compact structure, impact resistance, elastic energy storage, light weight and miniaturization.
Embodiment 2
[0039] This embodiment is basically the same as the first embodiment, and the special features are as follows:
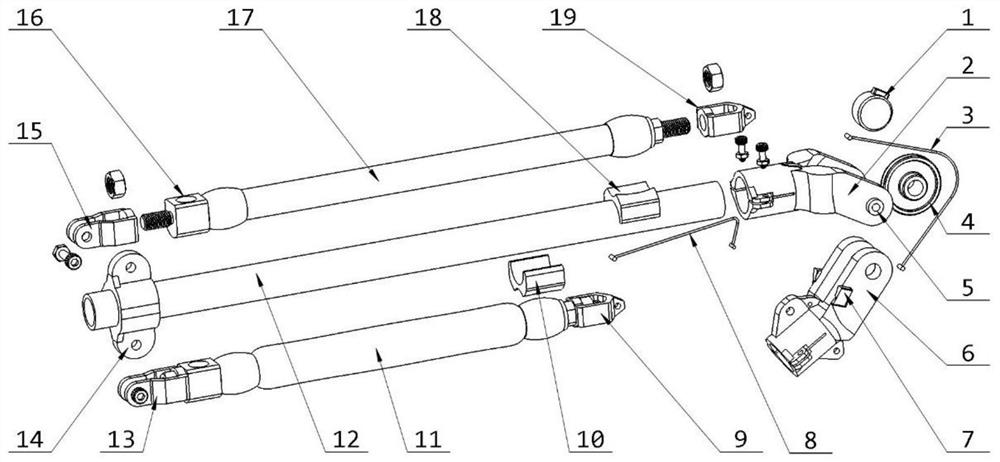
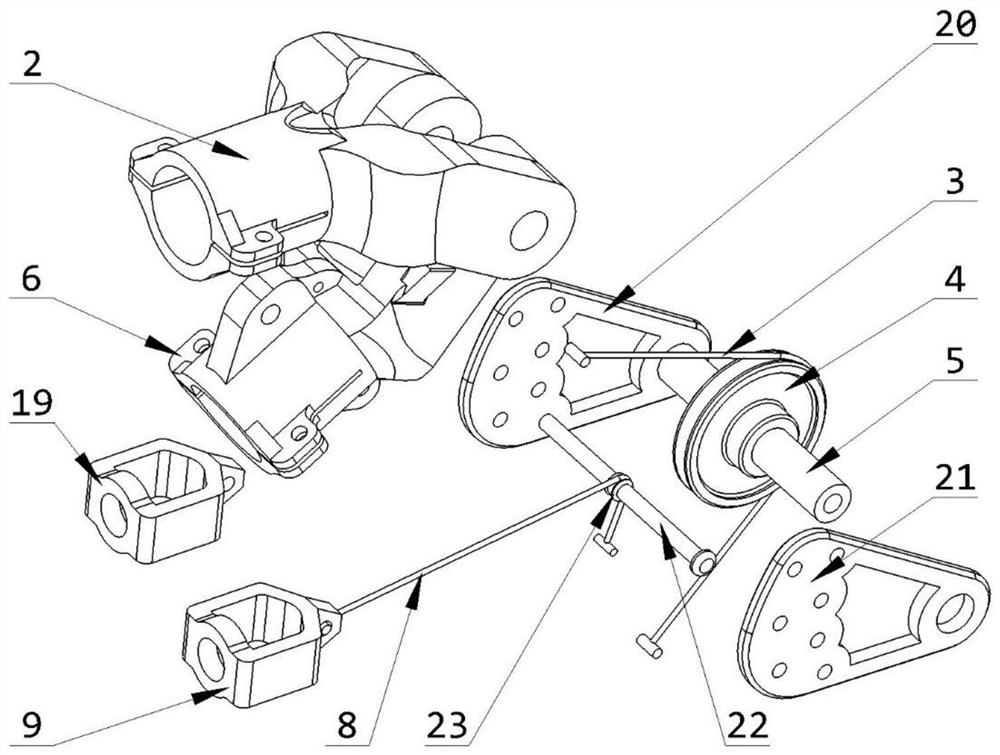
[0040] The pneumatic series elastic ankle joint module III includes a lower tibia support 56, an upper metatarsal support 58, a foot support 63, an ankle pneumatic artificial muscle 66, an ankle joint spring 60, an ankle joint return spring 64, an ankle joint pulley 54, an ankle joint The angular displacement sensor 57, the ankle joint pulley angular displacement sensor 70, the bionic jumping leg calf carbon tube 67, the ankle joint pneumatic artificial muscle 66 are connected to the ankle joint spring 60 through the wire rope 53 bypassing the ankle joint pulley 54, forming a series elastic drive, driving the ankle joint Joint extension movement; the sole of the foot includes a foot end bracket 63, a metatarsal upper bracket 58 and two sole carbon tubes 61, 62, the two sole carbon tubes 61, 62 are arranged in parallel to form the sole of the foot, and one side of the...
Embodiment 3
[0045] like figure 1 As shown, a bionic jumping leg using pneumatic series elastic joints includes hip joint module I, knee joint module II, pneumatic series elastic ankle joint module III; hip joint module I, knee joint module II, pneumatic series elastic ankle joint module III is hinged from top to bottom; the rotation axes of the hip joint, knee joint, and ankle joint are parallel to the three axes; the skeletal structure of the bionic jumping leg is fixed by a lightweight hollow rod and a resin bracket, which ensures the structural strength while ensuring the structural strength. , make the bionic jumping leg lightweight and miniaturized, the resin bracket is connected with an axial slot, and is connected with a bolt to form an interference fit with the bone lightweight hollow rod. The hip joint, knee joint and ankle joint are in The resin support structure is provided with a minimum limit structure.
[0046] like figure 2 As shown, the hip joint module 1 is composed of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More