

Robot motion skill learning method and system
A technology for robot movement and learning methods, applied in the field of robot movement skills learning methods and systems, can solve problems such as large neural network structure, limited human teaching data, and difficulty in algorithm hardware implementation, achieving high adaptability and improving generalization ability. And programming efficiency, to achieve the effect of self-learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
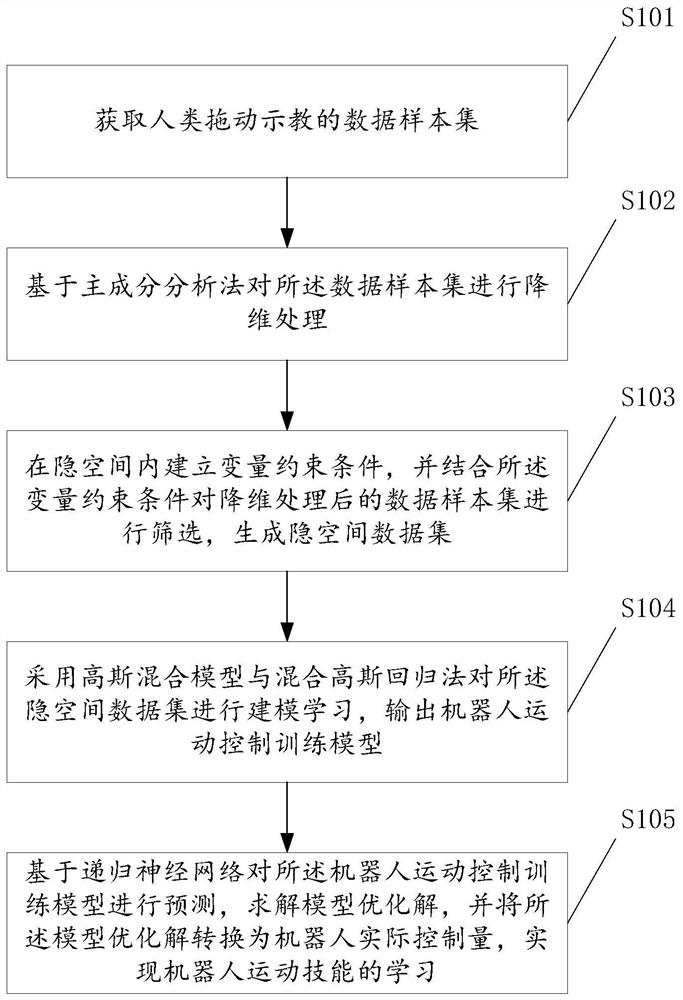
[0040] see figure 1 , figure 1 A schematic flowchart of a method for learning robot motor skills in an embodiment of the present invention is shown.
[0041] Such as figure 1 Shown, a kind of robot motor skill learning method, described method comprises the steps:
[0042] S101. Obtain a data sample set of human dragging and teaching;
[0043] The implementation process of the present invention includes: based on several times of dragging and teaching performed by humans to the robot, sequentially recording the sampling time X of the robot during each dragging and teaching process t,i,j with sampled data X s,i,j , where the sampled data X s,i,j Including the joint angle matrix θ of the robot s,i,j with the terminal execution position matrix x s,i,j , and finally the data sample set can be obtained as X s ={θ s , x s}.
[0044] It should be noted that the present invention assumes that humans perform n (i=1,...,n) times of dragging and teaching on the robot, and each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More