

Upper limb exoskeleton robot control method and device based on LSTM neural network
An exoskeleton robot and neural network technology, applied in the field of upper extremity exoskeleton robot control, can solve the problems of fast response, high modeling accuracy, and lack, and achieve the effect of good accuracy and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and examples. Each example is provided by way of explanation of the invention, not limitation of the invention. In fact, those skilled in the art will recognize that modifications and variations can be made in the present invention without departing from the scope or spirit of the invention. For example, features illustrated or described as part of one embodiment can be used on another embodiment to yield a still further embodiment. Therefore, it is intended that the present invention includes such modifications and variations as come within the scope of the appended claims and their equivalents.
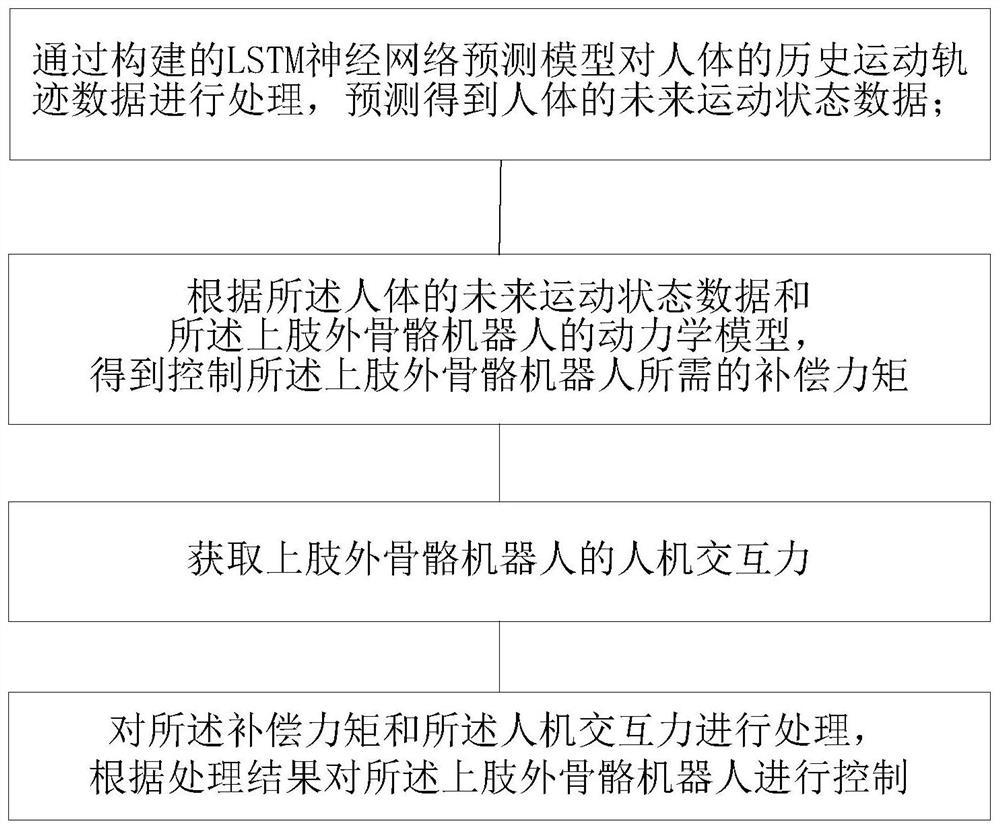
[0036] In this application, the upper extremity exoskeleton robot includes a main body and two robotic arms, and the upper two sides of the main body are respectively movably connected to the two robotic arms. In the application process of the upper limb exoskeleton robot, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More