

Anti-slip control method and system for construction hoist
A technology for construction lifts and control methods, applied in lifts, transportation and packaging, etc., can solve problems such as uncontrollable braking torque, uncontrollable driving torque connection and coordination, etc., so as to improve comfort and safety, and smooth the start-stop process. , The effect of stable startup process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The specific implementation manners of the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific implementation manners described here are only used to illustrate and explain the embodiments of the present invention, and are not intended to limit the embodiments of the present invention.
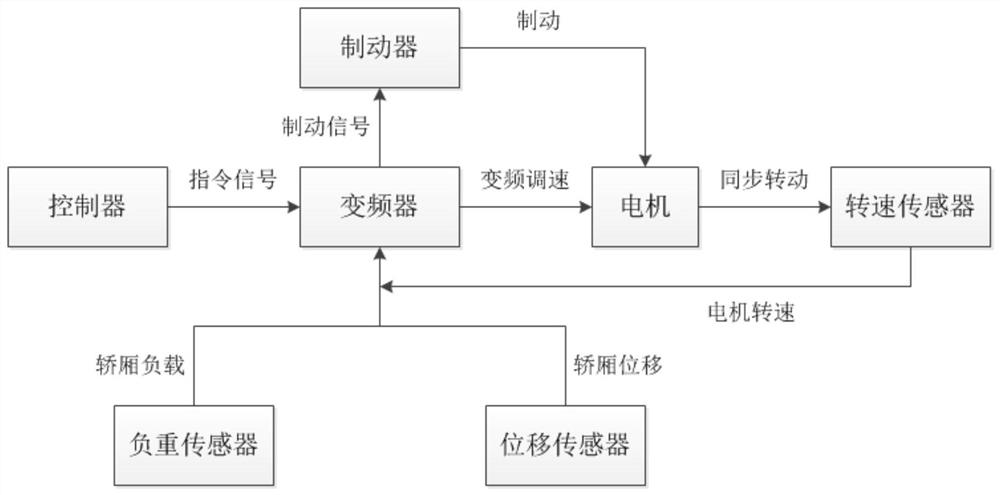
[0048] The construction hoist includes a frequency converter and a motor driven by the frequency converter to drive the car up / down of the construction hoist. In order to solve the situation that the construction hoist slips to different degrees at the moment of starting the car, the present invention provides a Anti-rolling car control method of construction hoist.
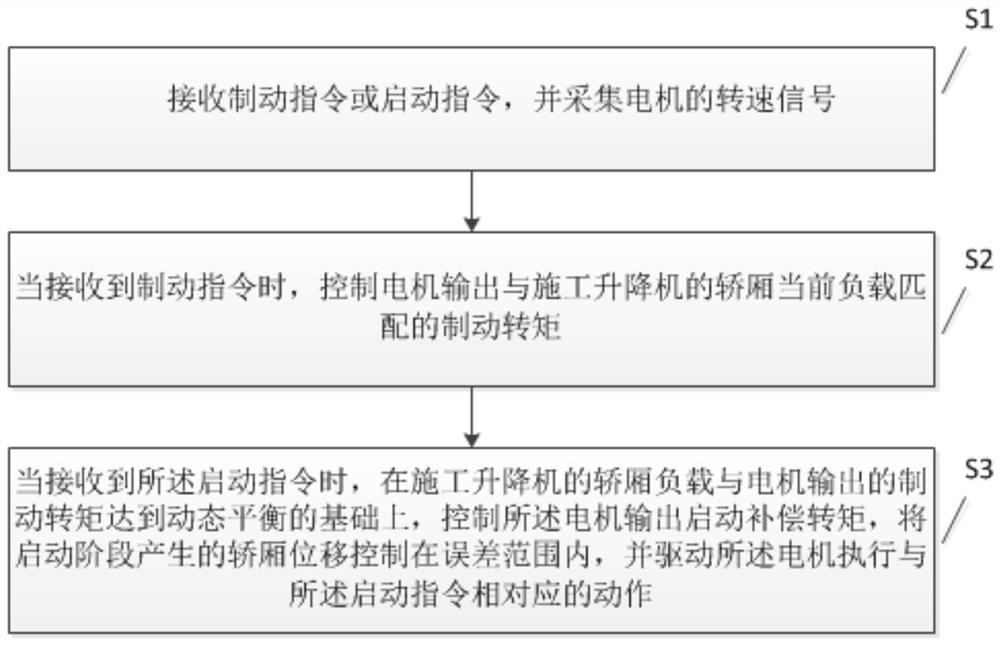
[0049] Such as figure 1 As shown, the anti-rolling vehicle control method includes:
[0050] Step S1, receiving a braking command or a starting command, and collecting a speed signal of the motor;
[0051] Specifi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More