Manipulator operation path planning method and device based on visual positioning
A path planning and visual positioning technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of deviation of the working path and the decline of the working accuracy, and achieve the effect of improving the working accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
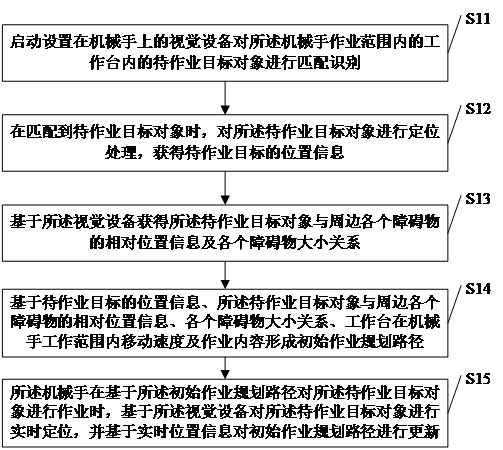
[0043] see figure 1 , figure 1 It is a schematic flow chart of the vision-based positioning-based manipulator operation path planning method in the embodiment of the present invention.
[0044] Such as figure 1 As shown, a method for planning a manipulator operation path based on visual positioning, the method includes:
[0045] S11: Start the vision device set on the manipulator to match and identify the target objects to be operated in the workbench within the working range of the manipulator;
[0046] In the specific implementation process of the present invention, the workbench is the working area controlled by the manipulator on the assembly line; the vision device is a dual-camera device, and the vision device is set on the manipulator to form a joint with the manipulator. hand-eye system.
[0047]Further, the start-up of the vision device installed on the manipulator to match and identify the target object to be operated in the workbench within the working range of ...
Embodiment 2
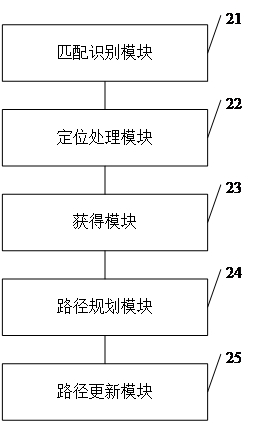
[0066] see figure 2 , figure 2 It is a schematic diagram of the structural composition of the visual positioning-based manipulator operation path planning device in the embodiment of the present invention.
[0067] Such as figure 2 Shown, a kind of robot operation path planning device based on visual positioning, said device includes:
[0068] Matching and identification module 21: used to start the vision device arranged on the manipulator to match and identify the target object to be operated in the workbench within the operation range of the manipulator;
[0069] In the specific implementation process of the present invention, the workbench is the working area controlled by the manipulator on the assembly line; the vision device is a dual-camera device, and the vision device is set on the manipulator to form a joint with the manipulator. hand-eye system.
[0070] Further, the start-up of the vision device installed on the manipulator to match and identify the target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com