

Power line fault overhaul unmanned aerial vehicle with live-working function
A technology for power lines and live work, applied in overhead lines/cable equipment, rotorcraft, manipulators, etc., can solve problems such as power failures that cannot be eliminated, and achieve high-precision and difficult operations, rapid inspection, and high operation accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
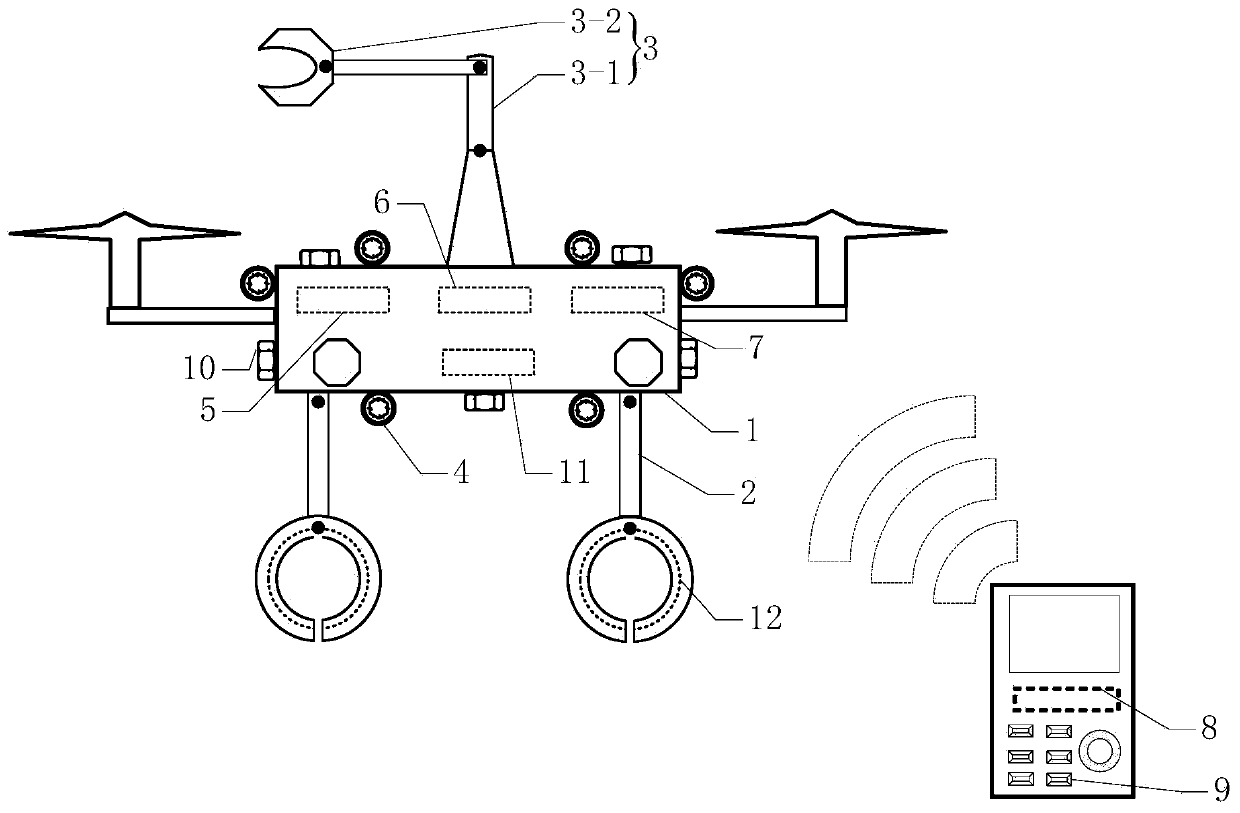
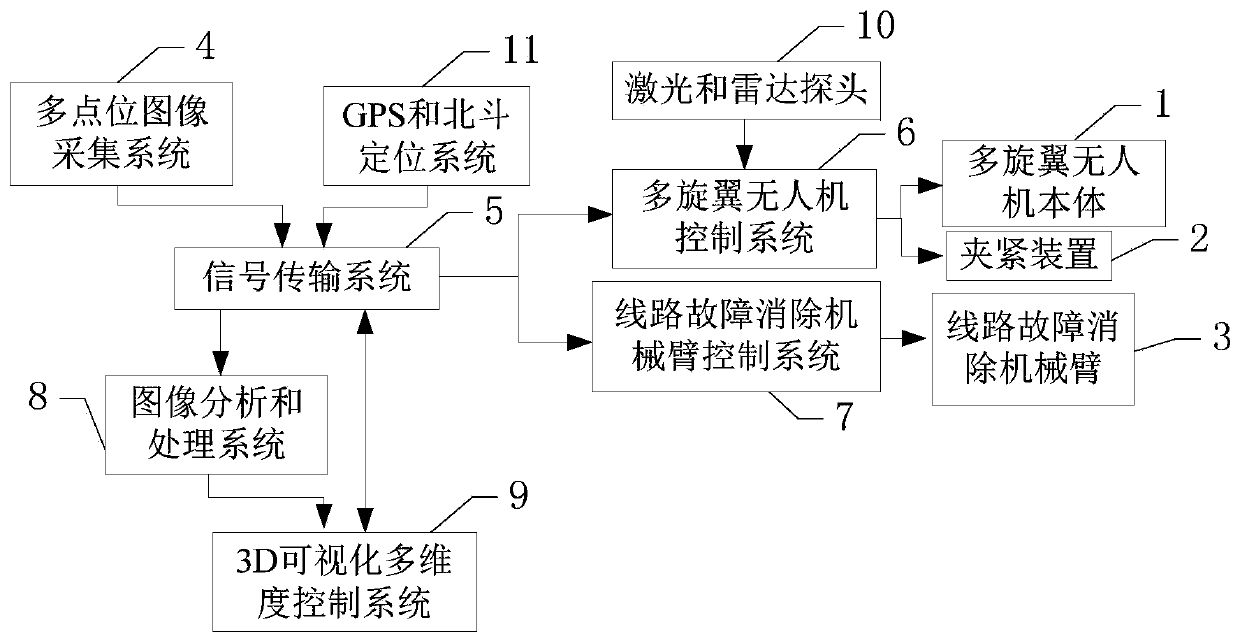
[0031] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment in detail. A UAV that can perform live-line work and repair power line failures described in this embodiment includes a multi-rotor UAV body 1, and also includes a clamping device arranged on the multi-rotor UAV body 1. Device 2, line fault elimination robotic arm 3, multi-point image acquisition system 4, signal transmission system 5, multi-rotor UAV control system 6, line fault elimination robotic arm control system 7, and image analysis and processing system on the ground 8 and 3D visualized multi-dimensional control system 9;
[0032] The multi-point image acquisition system 4 is used to collect image information around the drone and send it to the signal transmission system 5;
[0033] The signal transmission system 5 is used to send the received image information to the image analysis and processing system 8, and is also used to send the robot control signal sent by the 3D ...
specific Embodiment approach 2
[0046] Specific embodiment 2: This embodiment is a further description of the unmanned aerial vehicle that can perform live work and repair power line faults described in the specific embodiment 1. In this embodiment, it also includes a power supply device; the power supply device is used to use The electromagnetic field around the power line is used for wireless charging, and is also used to supply power for the multi-rotor UAV body 1 and the line fault elimination mechanical arm 3 .
[0047] In this embodiment, the power supply device includes an induction coil 12 and a wireless charging system; the output end of the induction coil 12 is connected to the input end of the wireless charging system.
[0048] In this embodiment, the clamping device 2 includes two semi-cylinders; the two semi-cylinders are mirror-symmetrical and have opposite concave arcs, and the power lines and / or electric fittings are clamped by the closing of the two semi-cylinders. Realize the full-wrapped c...
specific Embodiment approach 3
[0051] Specific embodiment three: this embodiment is a further description of the unmanned aerial vehicle that can perform live work and repair power line faults described in specific embodiment two. In this embodiment, laser and radar probes 10 are also included;
[0052] Laser and radar probes 10 are used to detect the distance between the drone and surrounding objects, and send the detection distance to the multi-rotor drone control system 6;
[0053] When the detection distance is less than the set warning value, the multi-rotor UAV control system 6 controls the multi-rotor UAV body 1 to hover or move in the opposite direction.
[0054] The laser and radar probes 10 are located above and below the multi-rotor UAV body 1 and around, which can monitor the distance between the UAV and the surrounding wires, power fittings and current poles at all times, and avoid the multi-rotor UAV from touching the above equipment. When the distance is less than the set warning value, the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More