Unmanned parking path planning method for special road scene
An unmanned and path planning technology, applied in the field of unmanned parking path planning, can solve problems such as low level of structure, and achieve the effect of improving the solution speed and shortening the length.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
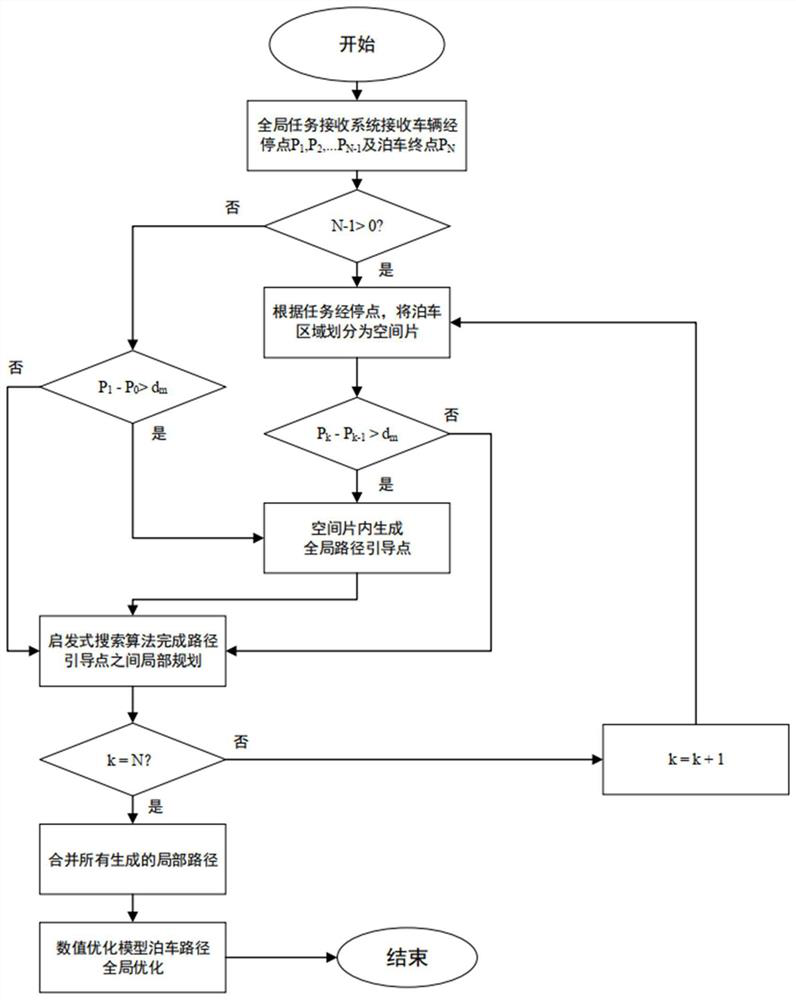
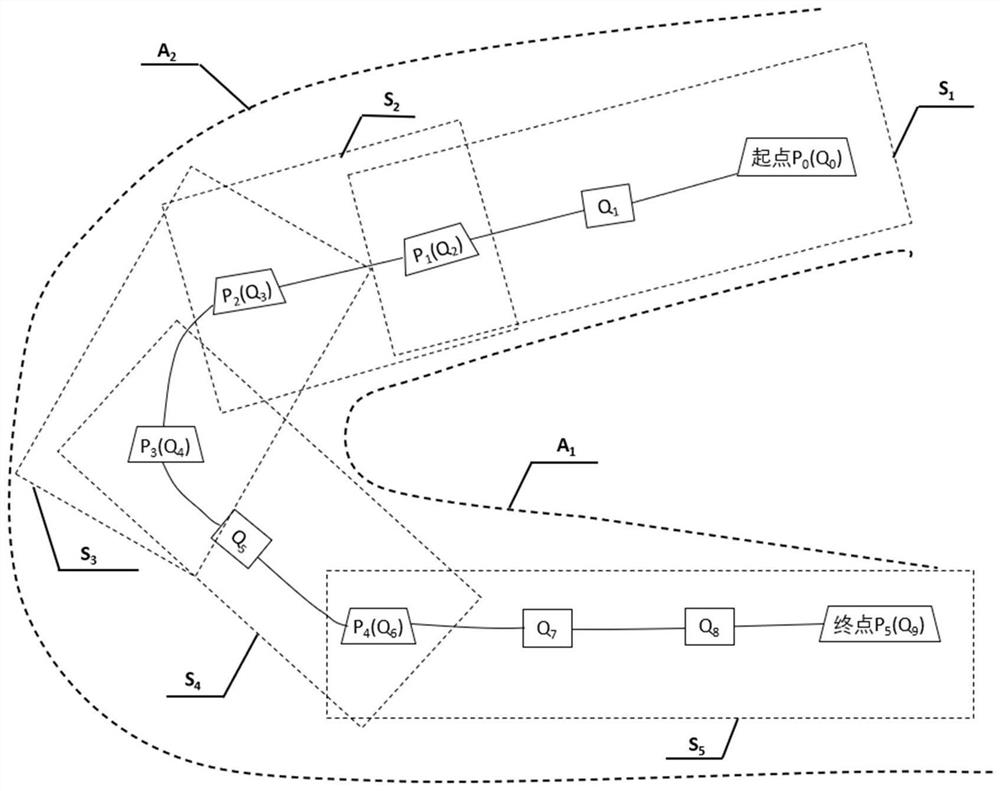
[0038] Step 1: Obtain P from the starting point of the vehicle 0 to parking end P N stop point P 1 ,P 2 ,...,P N-1 ; Among them, N is a positive integer.
[0039] An on-board computing unit for running path planning algorithms can be installed on each vehicle, and the parking destination P issued by the cloud intelligent platform can be received through the global task receiving system in the on-board computing unit. N and a series of stops P 1 ,P 2 ,...,P N-1 , the on-board computing unit will park the end point P N and all stops P 1 ,P 2 ,...,P N-1 Record and save. If there is no stopping point, only the parking end point will be recorded. like figure 2 As shown, from the vehicle starting point P 0 to parking end P 5 with four stops P 1 ,P 2 ,P 3 and P 4 , dotted line A 1 with dashed line A 2 represent the left and right boundaries of the road, respectively.
[0040] Step 2: Taking each stopping point as the demarcation point, divide the vehicle starti...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap