

Autonomous navigation unmanned aerial vehicle power optimization method based on deep reinforcement learning
A reinforcement learning and autonomous navigation technology, applied in mechanical equipment, combustion engines, internal combustion piston engines, etc., can solve the large end-to-end delay and energy consumption of UAVs, performance is greatly affected by bandwidth fluctuations, and cannot provide power. performance and other issues, to achieve the effect of improving computing power utilization efficiency, improving battery life, and improving power consumption utilization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The accompanying drawings are for illustrative purposes only, and should not be construed as limiting the present invention; in order to better illustrate this embodiment, certain components in the accompanying drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The positional relationship described in the drawings is for illustrative purposes only, and should not be construed as limiting the present invention.
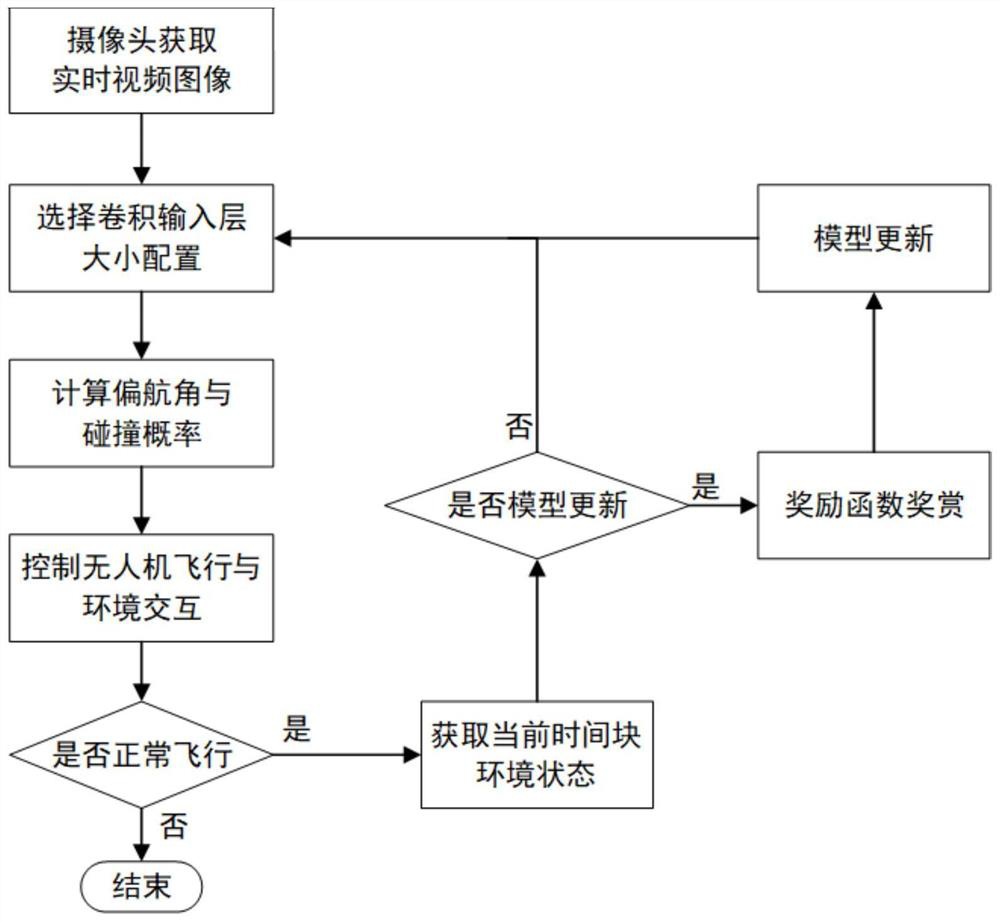
[0040] This embodiment discloses a power optimization method for self-driving drones based on deep reinforcement learning. The method realizes autonomous navigation through a deep neural network, combines reinforcement learning, and infers power from the environment state of the drone. The optimal configuration improves the endurance of the drone. Specifically include the foll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More