

Double-arm small fruit and vegetable harvesting robot
A robot and small-scale technology, applied in the direction of picking machines, harvesters, manipulators, etc., can solve problems such as strong seasonality, time-consuming and labor-consuming, and affecting farmers' income, so as to improve picking quality, avoid mutual pressure loss, and improve picking accuracy and the effect of picking quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
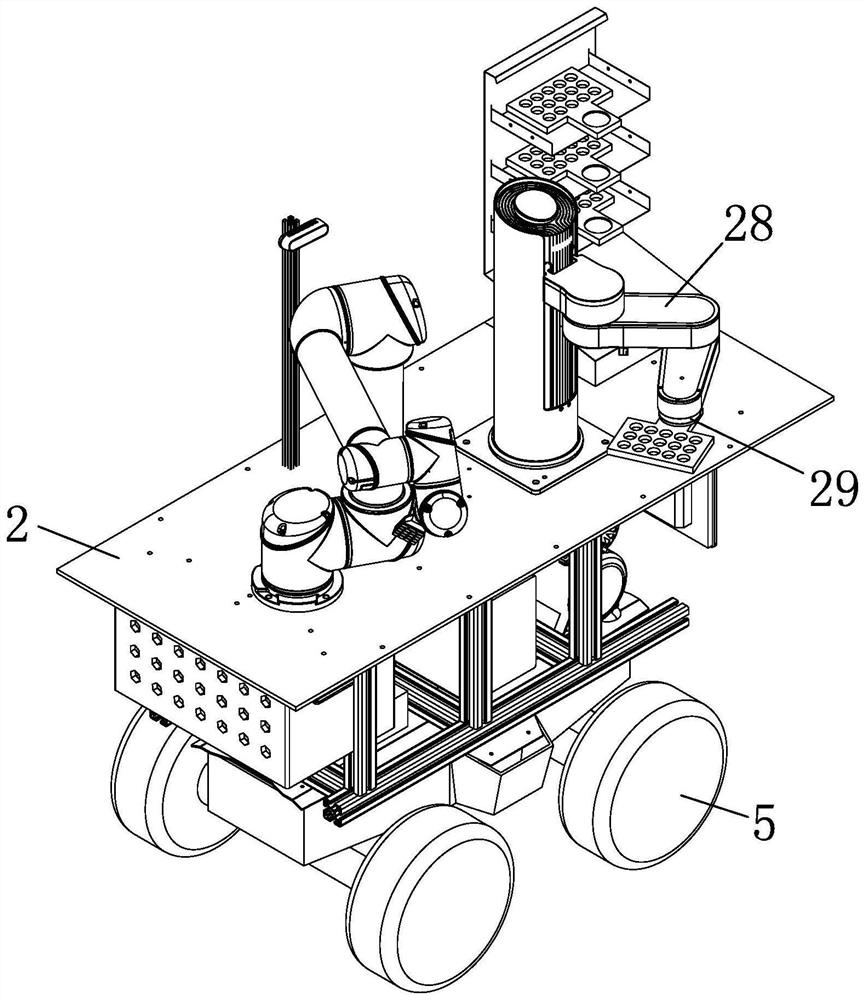
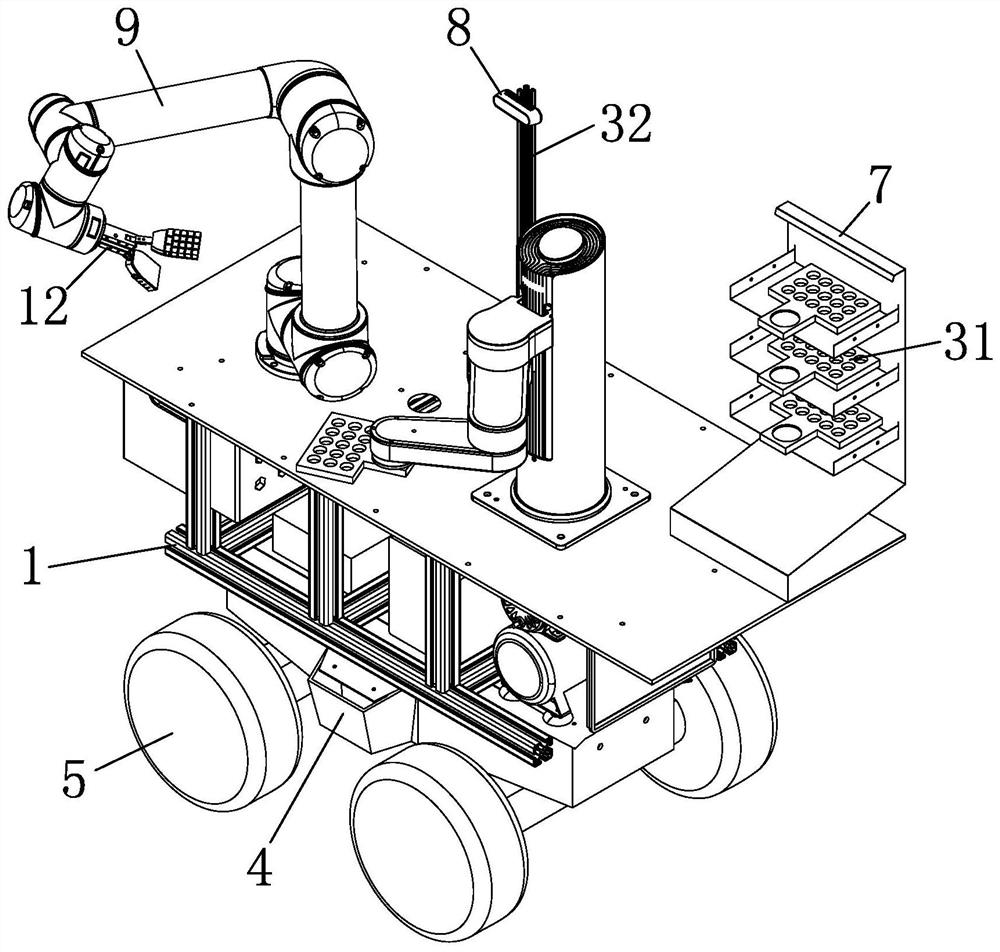
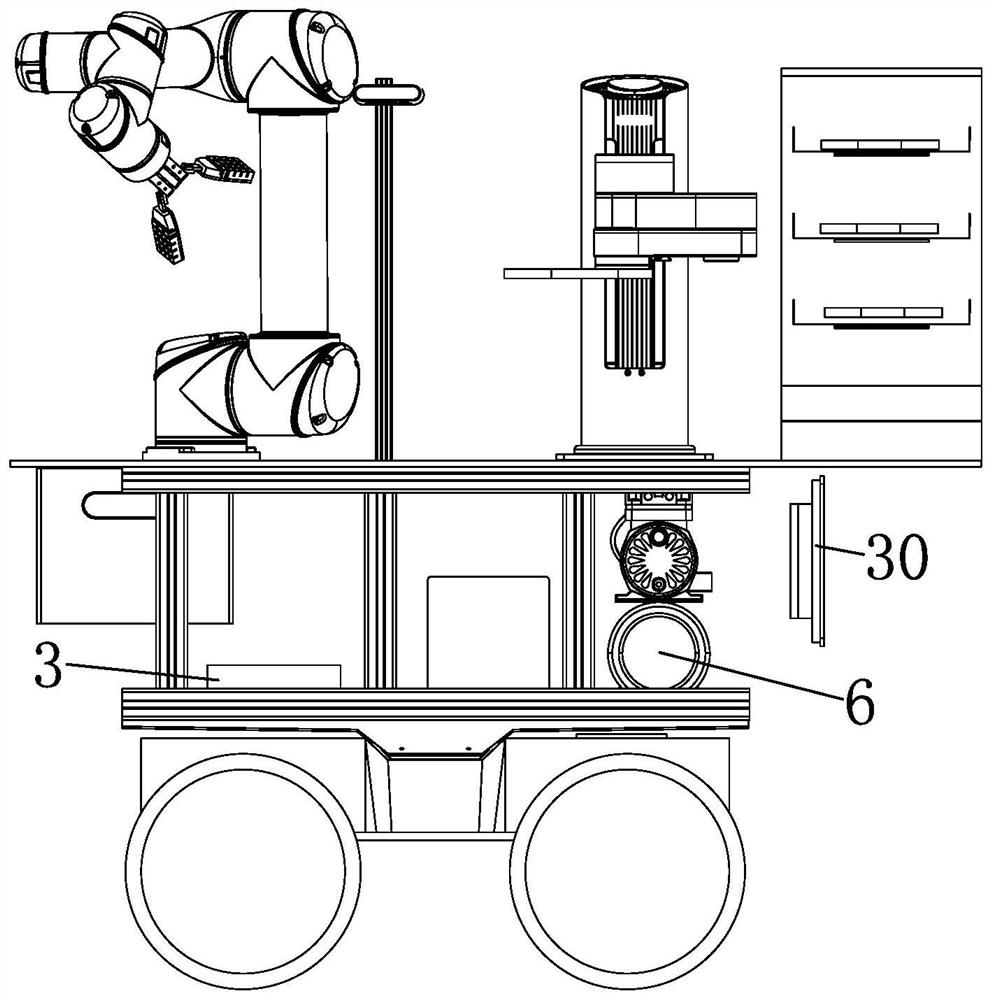
[0021] The present invention provides such Figure 1-5 The shown dual-arm small fruit and vegetable harvesting robot includes a mobile platform on which a picking manipulator, an auxiliary manipulator, a camera 8, a stacking frame 7 and a control unit are respectively arranged.
[0022] Described mobile platform comprises vehicle frame 1, and vehicle frame is a rectangular frame, and vehicle frame bottom is provided with mobile wheel 5, and vehicle frame is al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More