

Flexible mechanical gripper and working method thereof
A mechanical gripper and flexible technology, applied in the field of manipulator grippers, can solve the problems of small adaptability of manipulator grippers, high difficulty of manipulator gripper control, and small rope drive load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the implementation of the present invention in detail in conjunction with the accompanying drawings.
[0049] The implementation of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings, but it should be noted that these implementations are not limitations of the present invention, and those of ordinary skill in the art can perform functions, methods, or equivalents in mechanisms based on these implementations. Changes or substitutions all fall within the protection scope of the present invention.
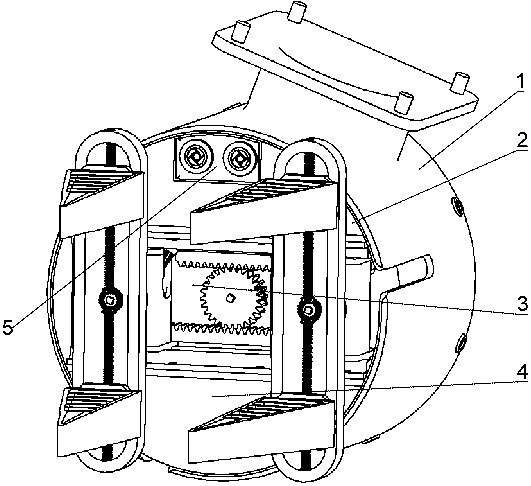
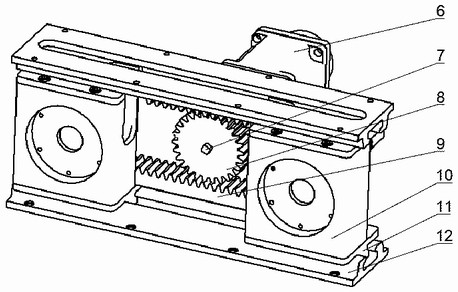
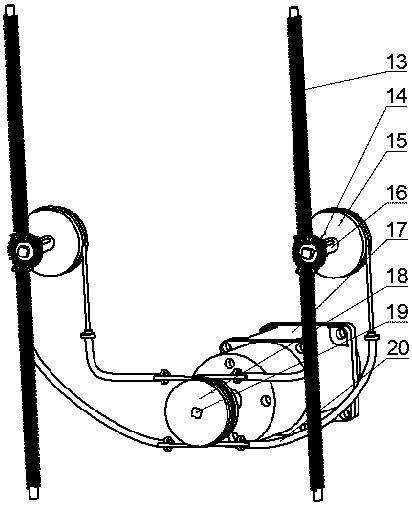
[0050] The invention as Figure 1 to Figure 5 As shown, it is a new type of flexible robotic gripper, which includes a main frame, a lateral movement module, a longitudinal movement module, a gripper locking module, a gripper rotation module, a torsion spring connection mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More