

Method and device for determining aerial photography triggering point
A technology for determining methods and trigger points, applied in the field of visual inspection, can solve the problems of complex debugging process, unknown overall time delay, and labor-intensive problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
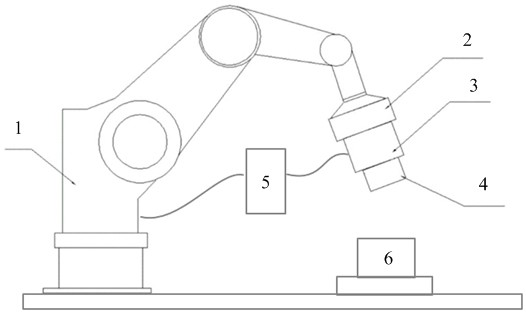
[0026] Such as figure 1 As shown, the flying shooting device in the embodiment of the present invention may include a robot arm 1 and a camera bracket 2, a camera 3, and a light source 4 arranged at the end of the robot arm 1, and includes an operating The calculation machine 5 of the control program. The mechanical arm 1, the camera bracket 2, the camera 3 and the light source 4 can be arranged corresponding to the platform 6 on which the object to be photog...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More