

Self-positioning method and device for unmanned aerial vehicle swarm
A technology of drone swarms and drones, applied in the field of communication, can solve the problems that GPS accuracy cannot meet the needs of drone swarm positioning, and no solutions have been proposed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings. Here, the exemplary embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
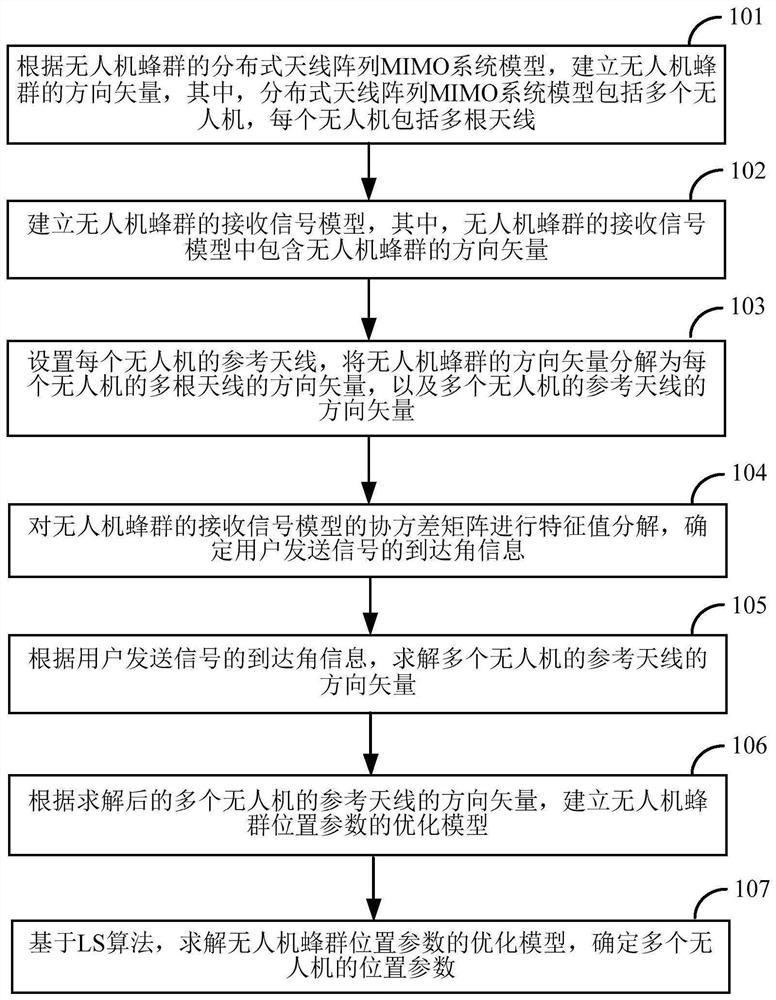
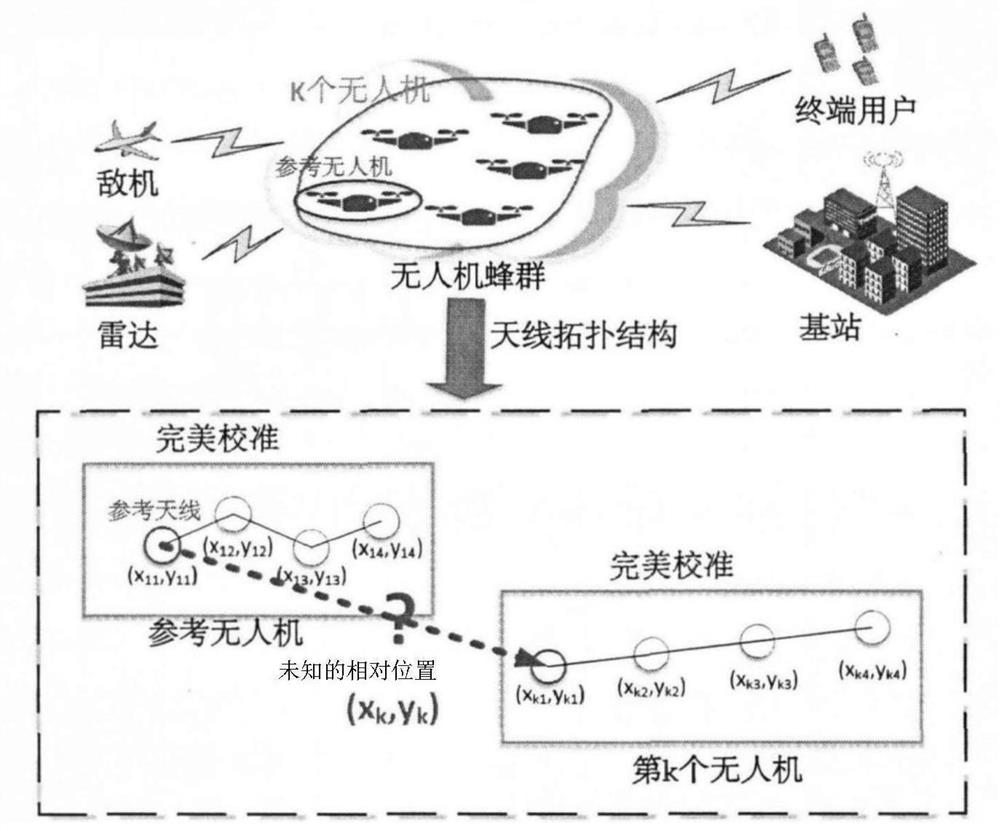
[0039] In order to solve the technical problem that the existing GPS-based positioning of UAVs is difficult to meet the positioning accuracy requirements of UAV swarms, an embodiment of the present invention provides a self-positioning method for UAV swarms, which is used to improve the accuracy of UAV swarm positioning. The positioning accuracy of the drone colony, figure 1 It is a schematic diagram of the self-positioning method flow of the drone swarm in the embodiment of the present invention, such as figure 1 As shown, the method includes:
[0040] Step 101: Ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More