

Inverse multi-solution selection and time optimal trajectory planning algorithm of mechanical arm
A trajectory planning, time-optimized technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as parameter perturbation, unmodeled dynamics, and external interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055]The present invention will be further described with reference to the accompanying drawings.
[0056]The problem to be solved by the present invention is to propose a mechanical arm retrorefulfacial selection and time optimal trajectory planning algorithm. The algorithm architecture is simple and efficient, and it is the most suitable set of solutions from the reverse solution. Excellent track ability.
[0057]The technical solution adopted by the present invention is:
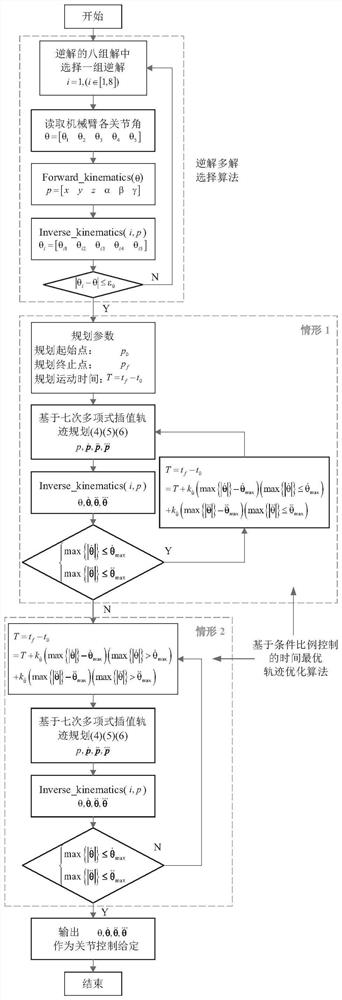
[0058]A mechanical arm reversal multi-solution selection and time optimal trajectory planning algorithm, characterized in that the overall algorithm architecture is based on the algorithm, and the optimal trajectory of retrieval multi-decision algorithm and time Planning algorithms, two major components. Among them, the overall idea of solving multi-solution algorithm is: according to the current mechanical arm bit posture, positive-reverse decentralization or reverse-positive solution conversion, the minimum number ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More