

An Algorithm for Inverse Solution Multiple Solution Selection and Time Optimal Trajectory Planning of Manipulator
A trajectory planning, time-optimized technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as uncertainty of manipulator modeling model, unmodeled dynamics, parameter perturbation, etc., and achieve real-time high-efficiency time Optimal trajectory planning, reducing the amount of calculation, ensuring the effect of non-oscillation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The invention will be further described with reference to the drawings.
[0056] The problem to be solved by the present invention is to propose a mechanical arm reverse understanding selection and time optimal trajectory planning algorithm. The algorithm architecture is simple and efficient, with rapid from the reverse solution multi-solution to choose the most suitable set of solutions and planned time Excellent track ability.
[0057] The technical solution to solve its technical problem is:
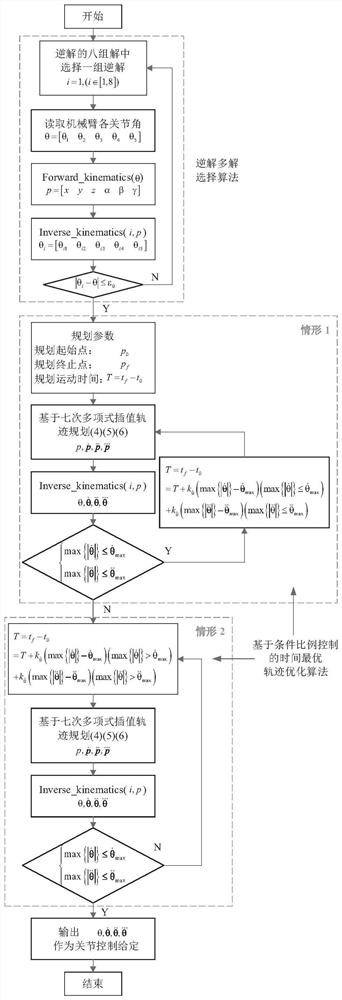
[0058] A mechanical arm reversal multicolor selection and time optimal trajectory planning algorithm, characterized in that the overall algorithm architecture is made by: retrieving multi-decision algorithm and time optimal trajectory Planning algorithms, two major components. Among them, the overall idea of solving the multi-decision algorithm is: according to the current mechanical arm position posture, positive-reversible or reverse-positive solution conversion, and the minimu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More