

Binocular image-based visual map generation method for mobile robot
A mobile robot and map generation technology, applied in the field of visual maps, can solve problems such as time-consuming and poor results, and achieve the effects of wide application range, negative impact and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. And the features in the embodiments can be combined with each other.
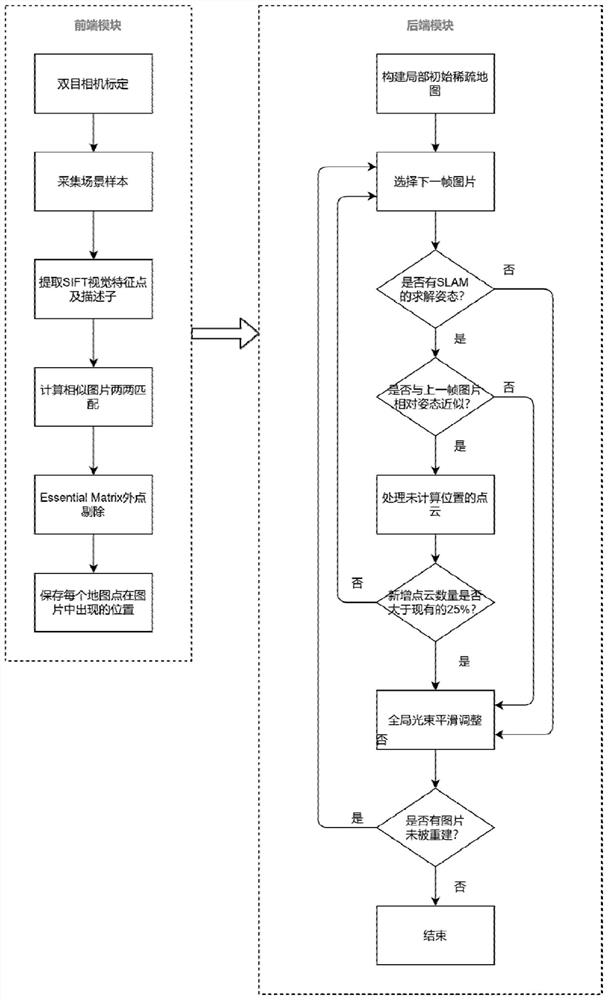
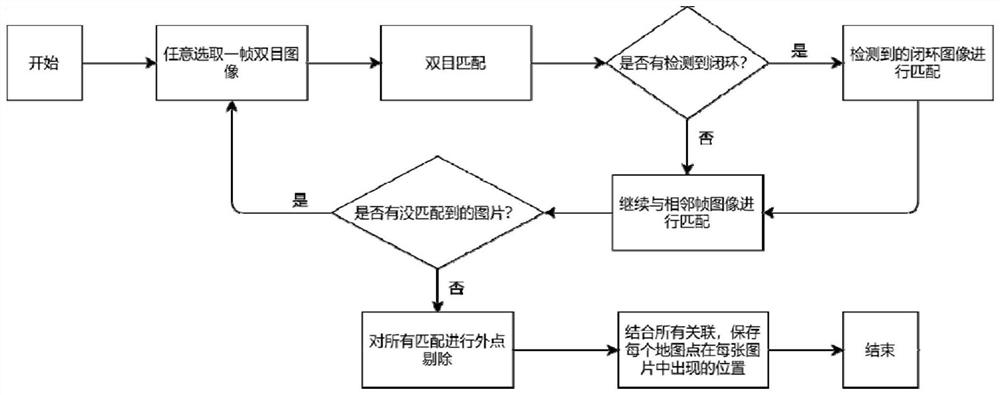
[0079] combine Figure 1 to Figure 3 As shown, the present invention provides a method for generating a visual map of a mobile robot based on a binocular image, specifically comprising the following steps:
[0080] S1. Construct the front-end module of the visual map generation method, specifically as follows:
[0081] S11. Use a binocular camera to collect a series of pictures as scene samples in a scene where a map needs to be established, and perform binocular positioning before using the binocular camera;
[0082] S12. Select a binocular image sequence with a certain interval length, and extract the SIFT visual feature points and descriptors therein...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More