

Route guidance system for man-machine cooperation environment and man-machine cooperation method
A technology of human-robot collaboration and route guidance, applied in the field of robotics, can solve the problems of unreasonable division of safety areas and the inability of human-robot collaboration to achieve the best results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
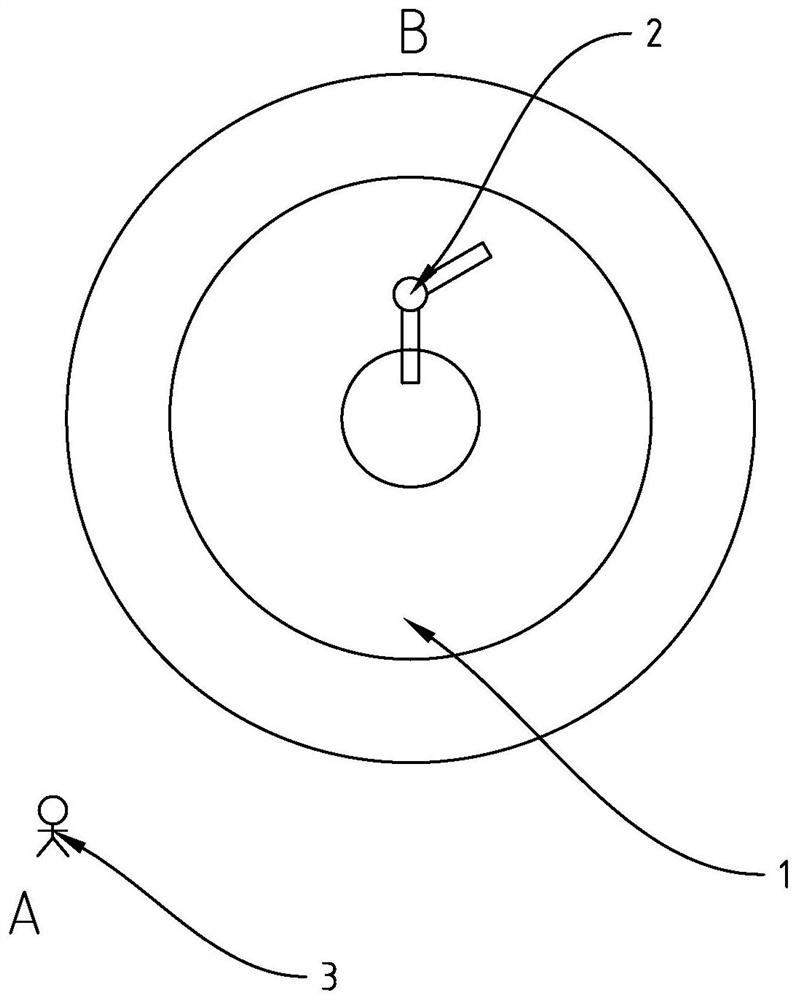
[0048] A route guidance system for a human-machine collaborative environment where at least one robot and at least one mobile body can work together,
[0049] The route guidance system includes:
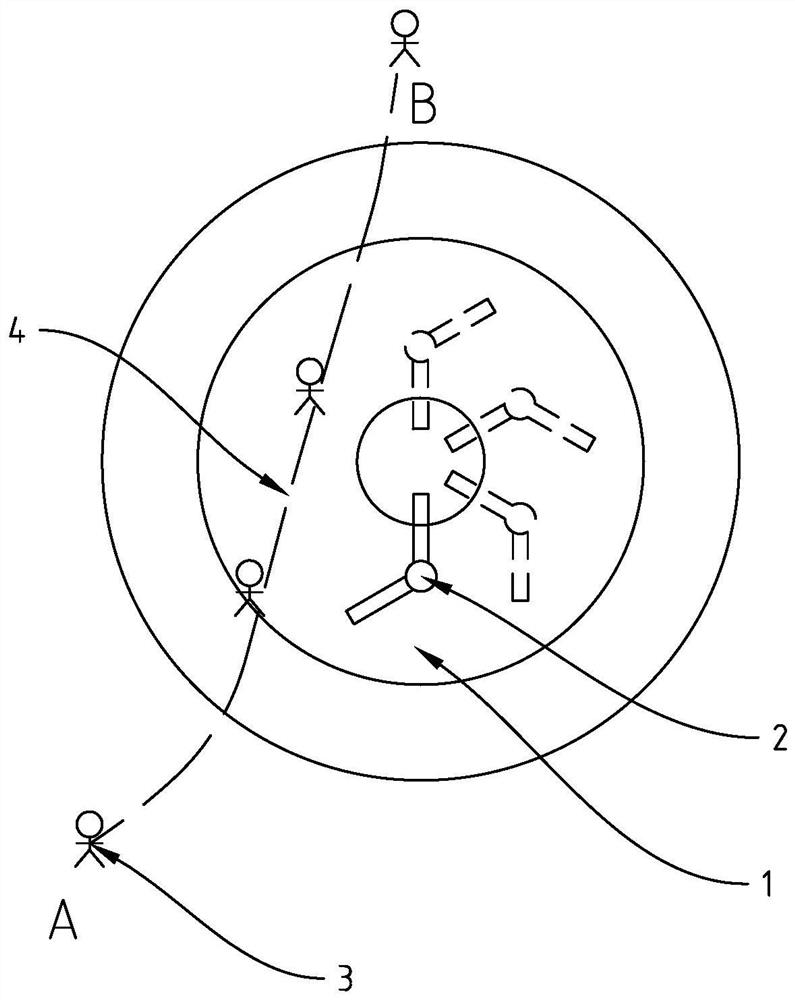
[0050] The robot orientation detection unit is used to obtain the position information and action information of the robot; the robot orientation detection unit acquires the position information and action information of the robot according to the action program for controlling the robot, and the robot orientation The detection unit includes a sensor for detecting position information and action information of the robot; the action information includes position change information of the whole or part of the robot;
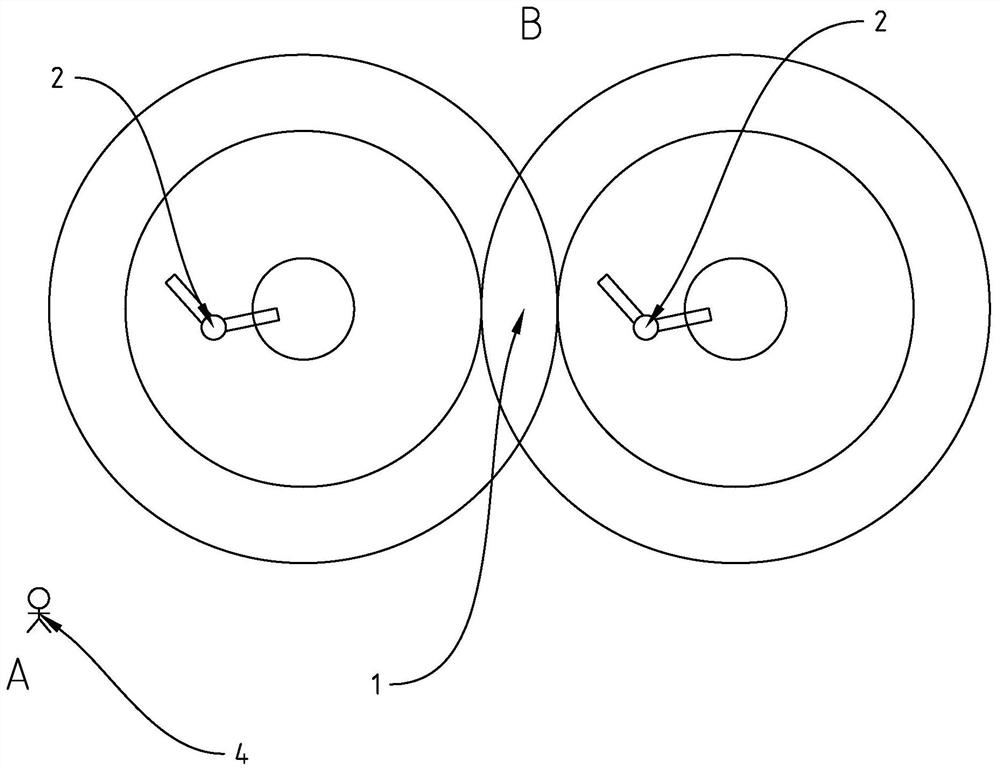
[0051] A safety partition unit, which divides the human-machine collaboration environment into regions with different security levels in real time according to the position information and action information of the robot;
[0052] The area divided by the security partiti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More