

RGB-D feature target tracking method based on twin network
A RGB-D, twin network technology, applied in the field of computer vision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
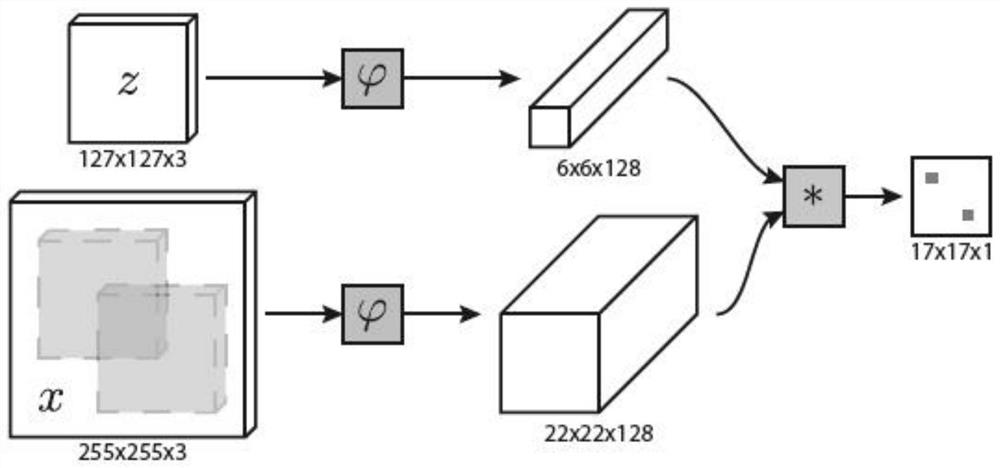
[0036] refer to figure 1 Shown is the traditional Siamese network structure diagram. Its structure is Y-shaped and consists of two inputs and one output. Among them, the input terminal z represents the template image, x represents the search image, Represents a shared network for extracting features, and the output is a similarity score map of the template image and the search image. Siamese networks formulate the tracking problem as learning a general similarity map that learns the similarity between template images and search image feature representations: where b represents the offset of each position.
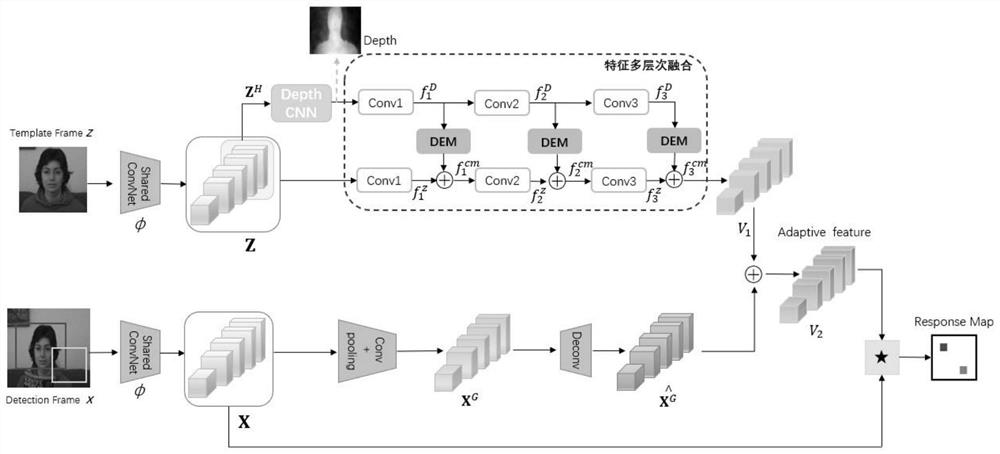
[0037] refer to figure 2 Shown, the present invention discloses a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More