

Unmanned aerial vehicle prevention and control method and system
A UAV, prevention and control technology, applied in the field of UAV defense, can solve the problems of low detection and identification accuracy, low countermeasure efficiency and efficiency, and single countermeasure method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, but these embodiments should not be construed as limiting the present invention.
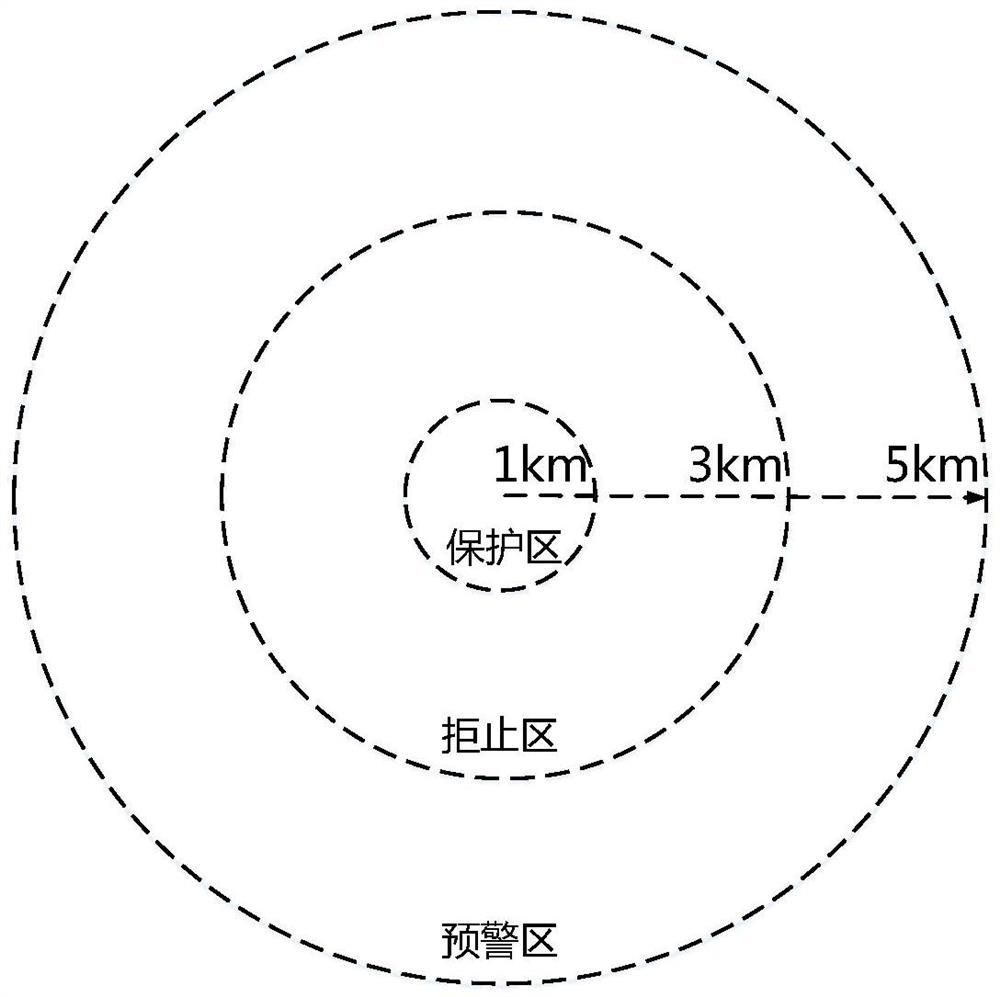
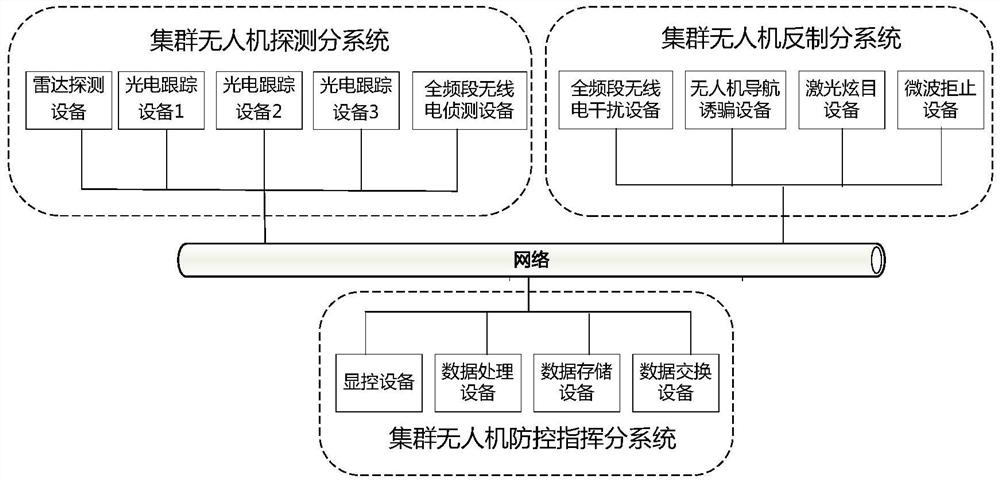
[0022] Such as figure 1 As shown, in this embodiment, a certain nuclear power plant is taken as the protection target, and a protection zone with a radius of 1 km, a denial zone with a radius of 3 km, and an early warning zone with a radius of 5 km are set up, and 6 small six-rotor UAVs are used as the prevention and control objects, such as figure 2 As shown, the drone prevention and control system in this embodiment includes a cluster drone detection subsystem, a cluster drone countermeasure subsystem, and a cluster drone prevention and control command subsystem.
[0023] The cluster UAV detection subsystem in this embodiment consists of one radar detection device, three photoelectric tracking devices and one full-band radio detection device.
[0024] The rada...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More