

Radar shielding blind area calibration method and device
A calibration method and radar blind zone technology, applied in the radar field, can solve the problems of large amount of calculation, slow speed, and inability to meet the calibration of radar blind zone, and achieve the effect of rapid calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
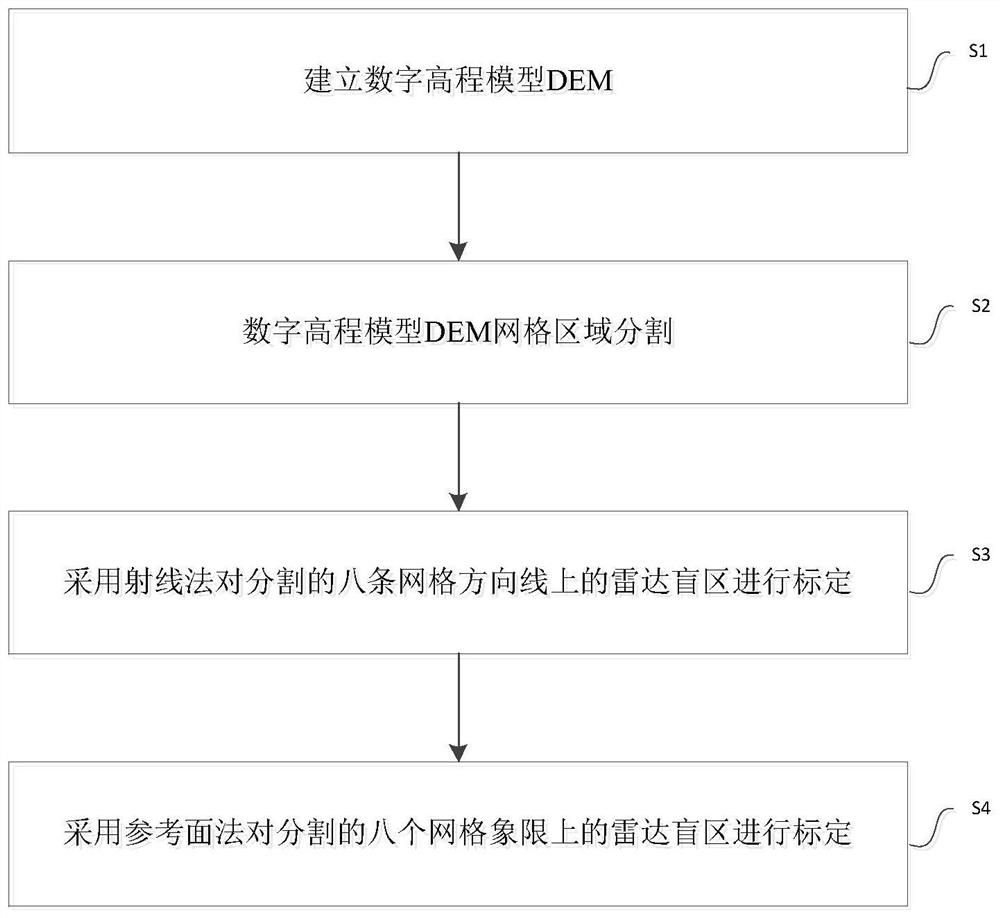
[0048] This embodiment discloses a method for calibrating radar shadowing blind areas, such as figure 1 shown, including the following steps:
[0049] Step S1, based on the digital map information of the radar detection area, establish a digital elevation model DEM based on a regular rectangular grid reference surface; each grid point includes a DEM elevation;
[0050] Specifically, the size of the regular rectangular grid on the reference surface, that is, the width of the grid’s row interval dx and column interval dy, can be determined according to the resolution requirements for the calibration of radar shadowing blind areas. At each grid point (m, n ) includes a DEM elevation information r.
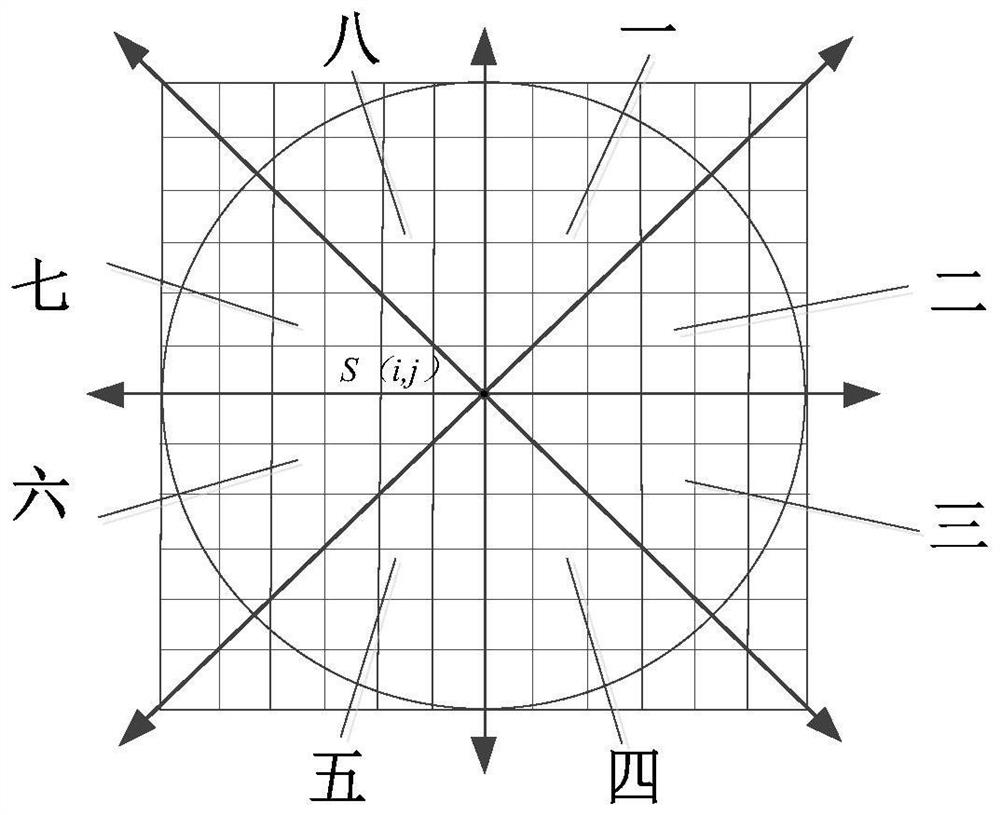
[0051] Step S2. On the grid reference plane, take the grid point S(i, j) where the radar detection point is located as the origin, take the grid with row number i as the horizontal axis, and take the grid with column number j as the vertical axis Axis, according to the eight-quadran...
Embodiment 2
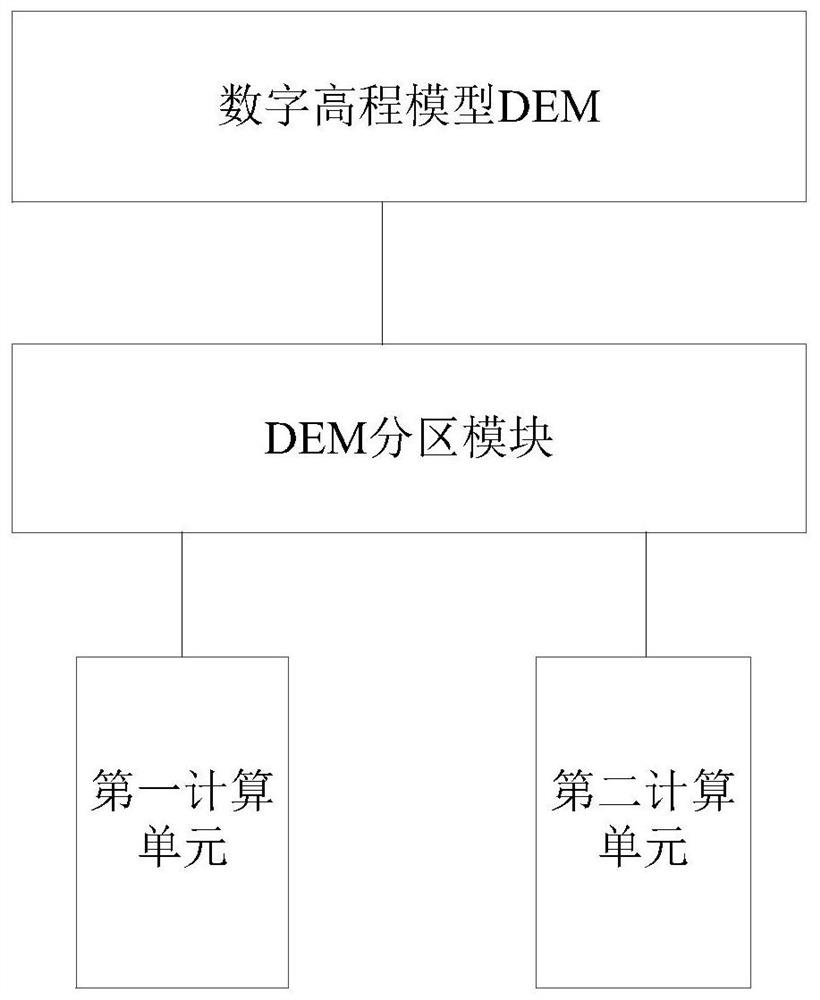
[0094] This embodiment discloses a radar masking blind area calibration device, such as image 3 As shown, it includes digital elevation model DEM, DEM partition module, first calculation unit, second calculation unit,
[0095] Digital elevation model DEM, a digital elevation model DEM based on a regular rectangular grid reference surface; each grid point includes a DEM elevation;
[0096] The DEM partition module is based on the grid point S(i, j) where the radar detection point is located as the origin, the grid with the row number i as the horizontal axis, and the grid with the column number j as the vertical axis, according to the plane Cartesian coordinates The eight-quadrant division method of the system divides the digital elevation model DEM area into eight grid direction lines and eight grid quadrants separated by grid lines;
[0097] The first computing unit is used to obtain eight grid direction line divisions from the DEM division module, and adopts the ray method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More