Unmanned aerial vehicle control method
A control method, UAV technology, applied in directions such as non-electric variable control, control/regulation system, 3D position/channel control, etc., which can solve the problem of large airframe resistance, airframe tilt, UAV flight speed and endurance time Adverse effects and other problems, to achieve the effect of reducing labor intensity and reducing resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
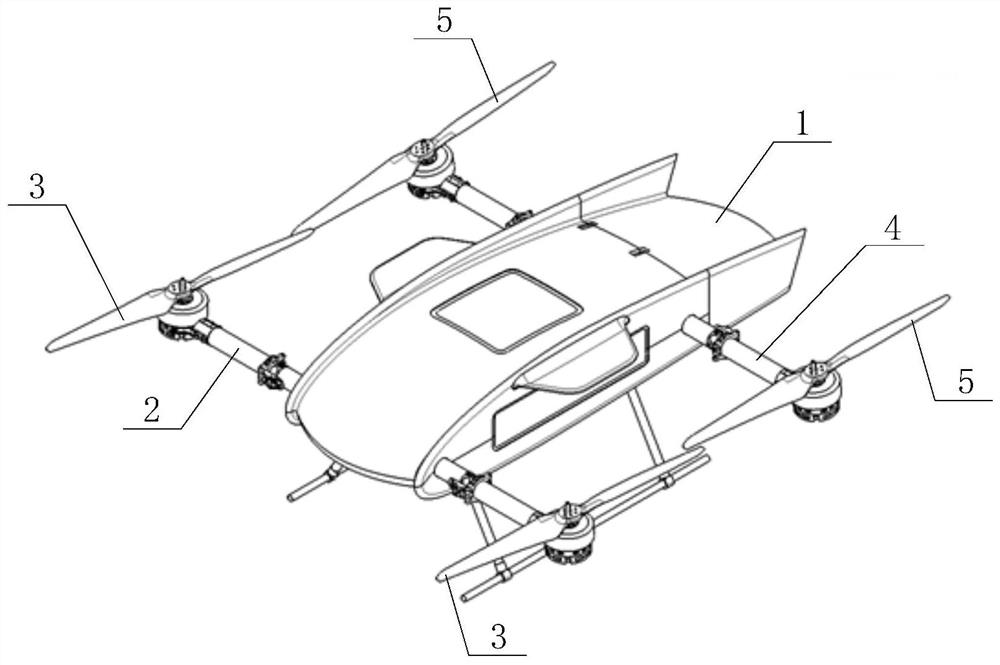
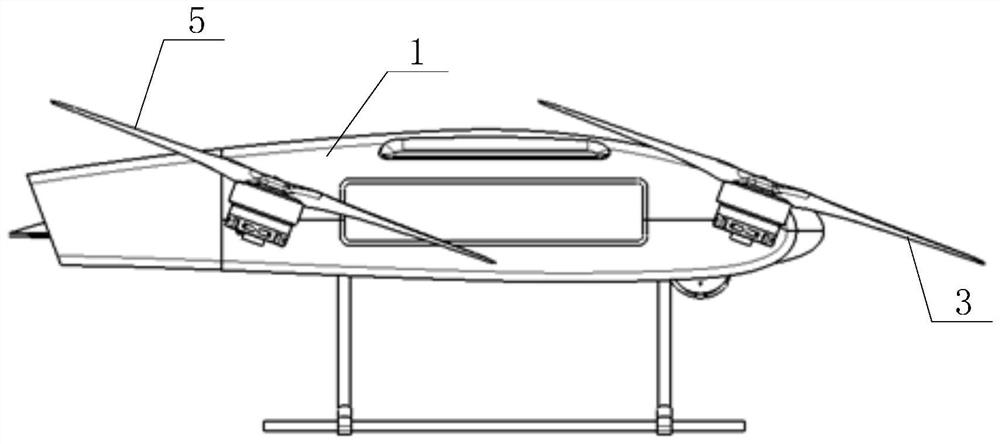
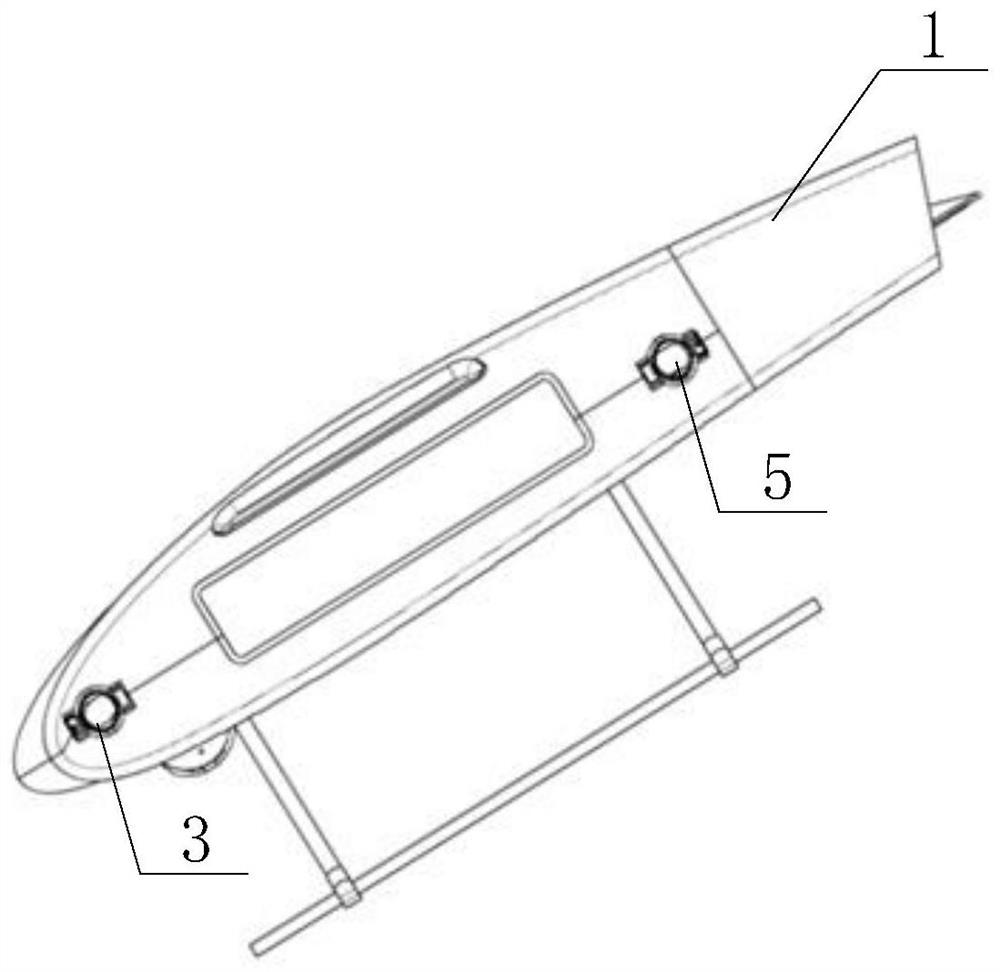
[0068] The core of the present invention is to provide a UAV control method, which reduces the labor intensity of the user in the UAV cruise mode while reducing the resistance generated by the fuselage when the UAV is in the cruise mode.
[0069] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0070] Please refer to Figure 1 to Figure 12 .
[0071] In a specific implementation, the UAV control method provided by a specific embodiment of the present invention includes the steps of:
[0072] Set the flight mode of the drone through the control system. The specific control system can be set on the fuselage of the drone.
[0073] The flight mode includes a cruise mode and a work mode. In the cruise mode, the upward extension direction of the propeller axis of the drone is an acute ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com