

Long-time human body lower limb motion prediction method based on IPSO-BPNN
An IPSO-BPNN and motion prediction technology, applied in the field of robotics, can solve problems such as low calculation efficiency, complex model calculation, and imperfect evaluation standards, and achieve the effects of high calculation efficiency, good optimization results, and fast iterative convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to enable those skilled in the art to better understand the solutions of the present application, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application.
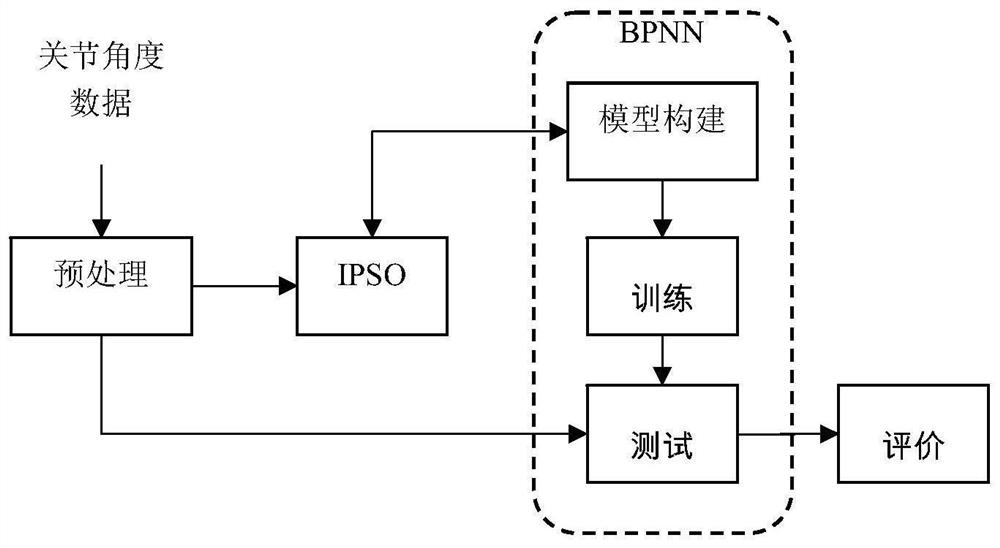
[0059] A long-term human lower limb motion prediction method based on IPSO-BPNN, comprising the following steps:
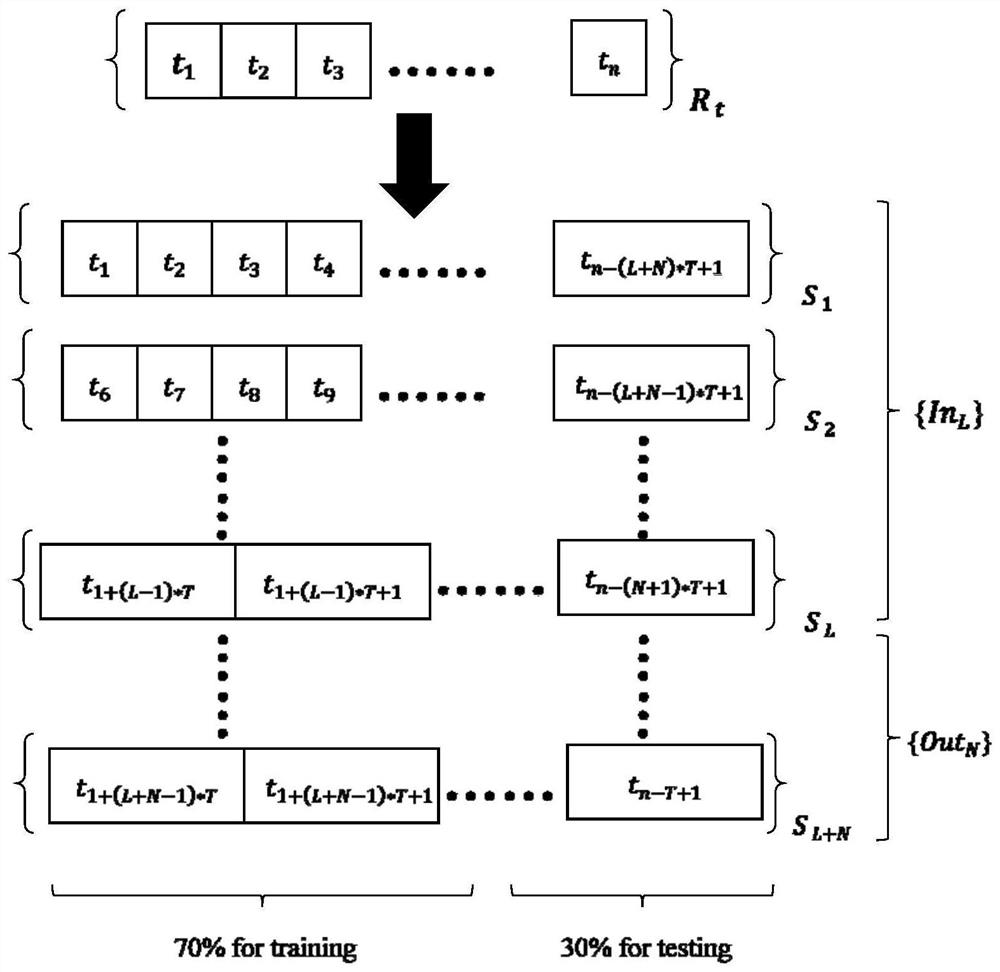
[0060] S1: Preprocess the joint angle data of each lower limb joint to obtain training samples and test samples corresponding to each lower limb joint. At the same time, divide the data in each training sample and each test sample into input data and In the output data part, the lower limb joints include left hip joints, right hip joints, left knee joints, right knee joints, left ankle joints and right ankle joints.
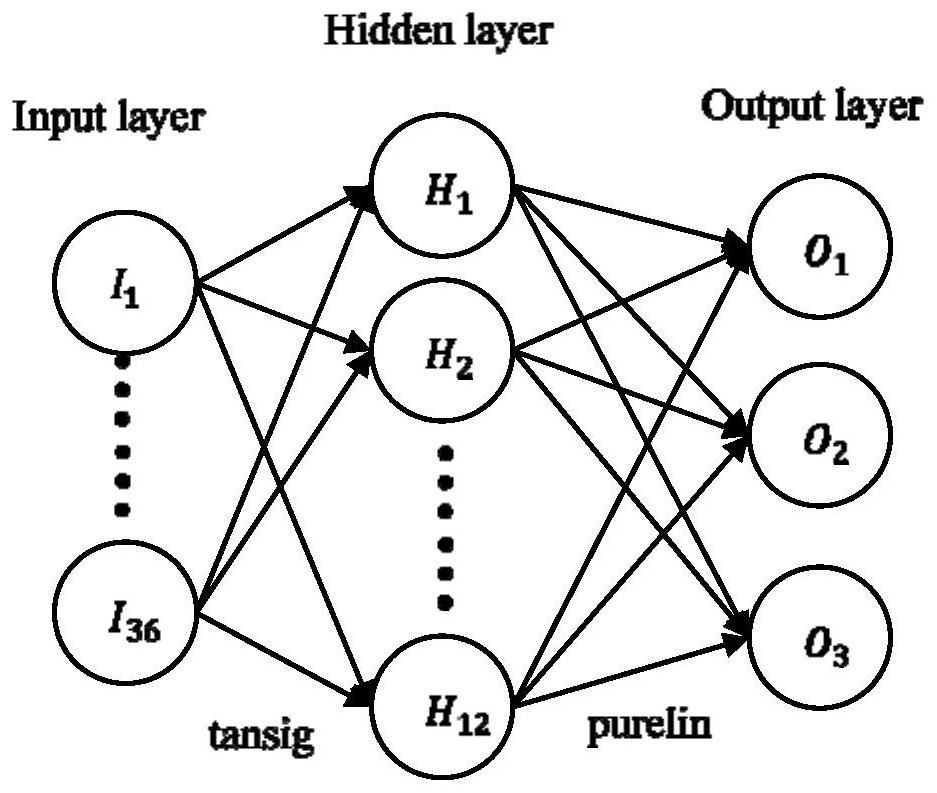
[0061] S2: Use each lower limb joint as the current joint to perform a model training operation to obtain a BPNN joint angle prediction model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More