Workpiece grabbing method and device, computer equipment and storage medium
A technology for workpieces and components, applied in the fields of workpiece grasping, devices, computer equipment and storage media, can solve the problems of complex background, easy interference of material frames, inability to obtain complete point cloud data, etc. The effect of success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
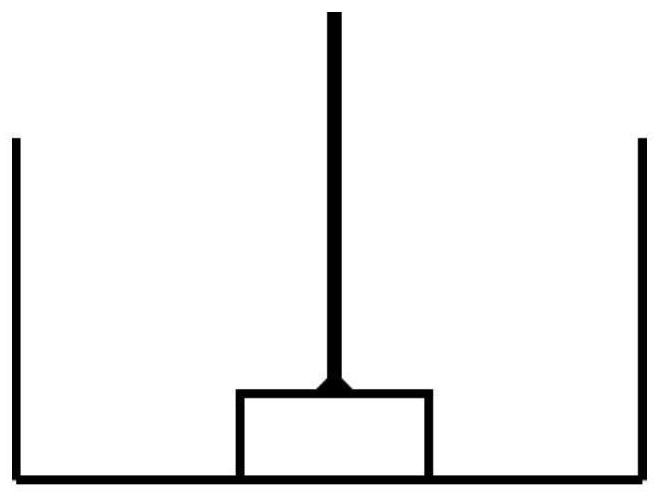
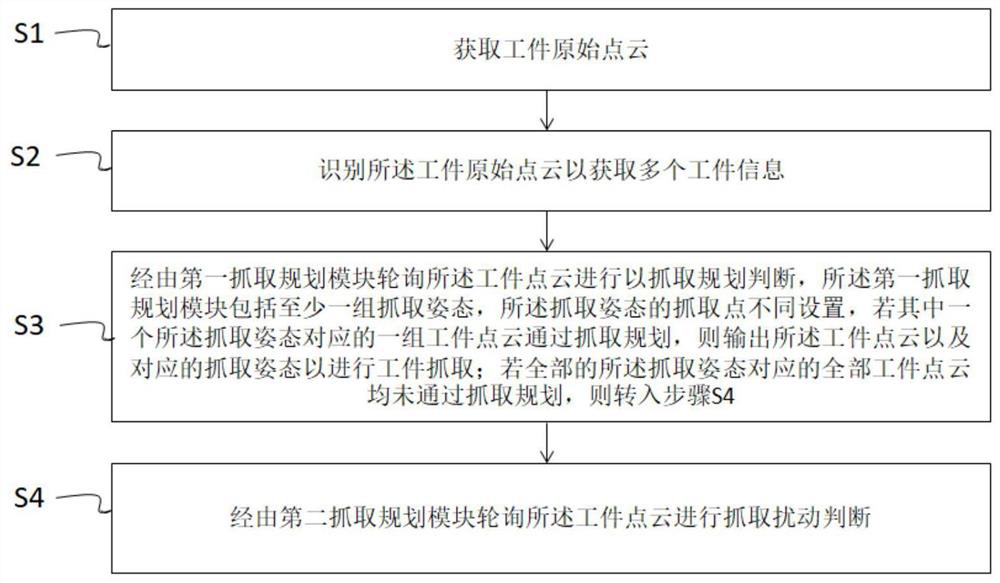
[0080] Such as image 3 As shown, the invention discloses a workpiece grasping method, which uses the terminal gripper to grasp the workpiece in the material frame. The terminal gripper includes a straight rod and a gripper assembly. The workpiece grasping method includes the following steps:
[0081] S1 acquires the original point cloud of the workpiece;
[0082] S2 identifies the original point cloud of the workpiece to obtain multiple workpiece information, and each workpiece information includes the workpiece point cloud and workpiece pose;
[0083] S3 polls the workpiece information via the first grasping planning module to determine the grasping planning. The first grasping planning module includes at least one group of grasping postures, and the grasping points of the grasping postures are set differently. If one of the grasping postures corresponds to A set of workpiece information passes the grasping plan, then output the workpiece information and the corresponding g...
Embodiment 2
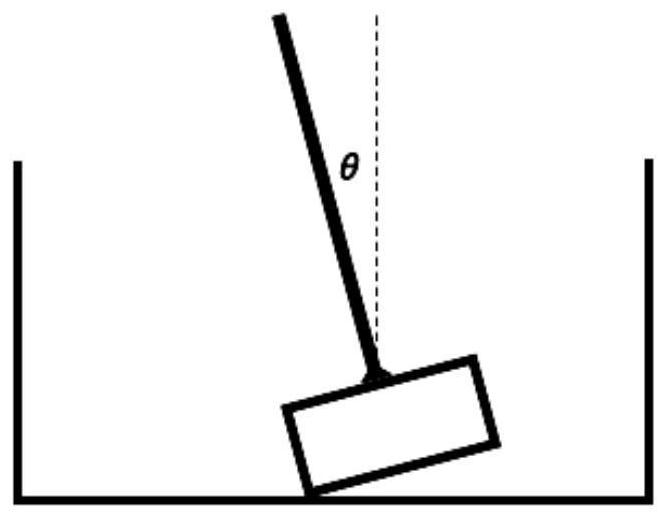
[0123] Although the workpiece grasping method shown in Embodiment 1 solves the problems of product size and spatial position, the existing motion planning requires that the manipulator be extended into the material frame, and the grasping depends on the kinematics model of the manipulator body. If the straight rod angle When θ is greater than 30°, there are problems such as insufficient arm span of the robot and interference with the material frame. Especially in practical applications, the above problems are more obvious due to the limited space of the site.
[0124] On the basis of Embodiment 1, the present invention further provides a workpiece grasping method, which uses the end gripper to grasp the workpiece in the material frame, such as Figure 16 As shown, the end gripper 20 includes a straight rod 21 and a gripper assembly 22, the gripper assembly and the straight rod are set at an angle, and the straight rod is connected to the external robot arm so that the robot arm...
Embodiment 3
[0168] The present invention also discloses a workpiece grabbing device 10, which uses an end gripper to grip a workpiece, and the end gripper includes a straight rod and a gripper assembly connected with the straight rod;
[0169] Such as Figure 21 As shown, the workpiece grabbing device 10 includes:
[0170] The original point cloud acquisition module 11 is used to obtain the original point cloud of the workpiece;
[0171] The workpiece information acquisition module 12 is used to identify the original point cloud of the workpiece to obtain a plurality of workpiece information, and each workpiece information includes a workpiece point cloud and a workpiece pose;
[0172] The first grasping planning module 13 is used to poll the workpiece information to determine the grasping planning. The first grasping planning module includes at least one group of grasping posture judgment submodules, and the grasping posture in the grasping posture judgment submodule Different settings...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com