

Mechanical arm tail end pose error measurement method and system
A technology of error measurement and robotic arm, applied in the direction of measuring device, image data processing, calculation model, etc., to achieve the effect of high-precision industrial robotic arm end pose error measurement and high industrial robotic arm end pose error measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0043] It should be noted that although the functional modules are divided in the schematic diagram of the system and the logical sequence is shown in the flowchart, in some cases, the modules can be divided differently from the system, or executed in the order in the flowchart. steps shown or described. The terms "first", "second" and the like in the description and claims and the above drawings are used to distinguish similar objects and are not necessarily used to describe a specific order or sequence.
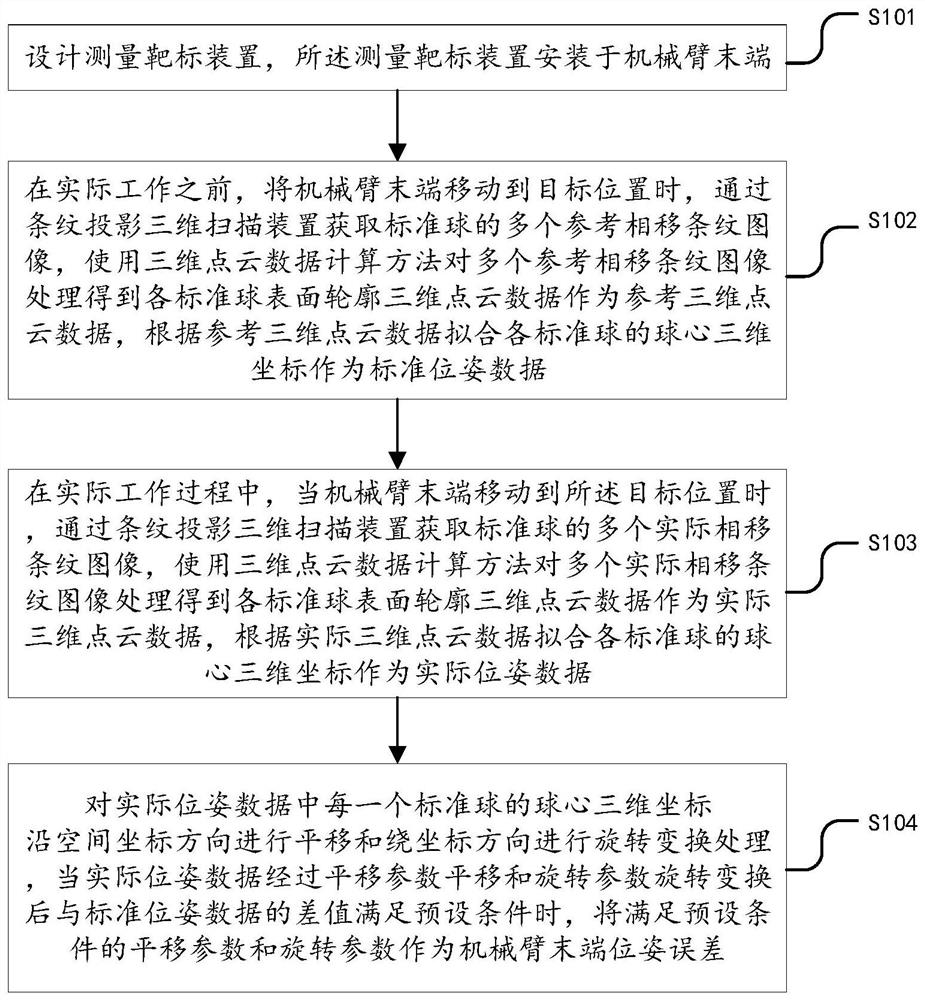
[0044] figure 1 It is a method for measuring the position and attitude error of a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More