

Wrist structure of spraying robot
A spraying robot and wrist technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of insufficient space inside the manipulator, complex structure, and affecting the normal operation of pipelines, so as to avoid uneven paint flow, reliable movement, Avoid the effect of pipeline breakage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Obviously, the described embodiments are part of the present invention Examples, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
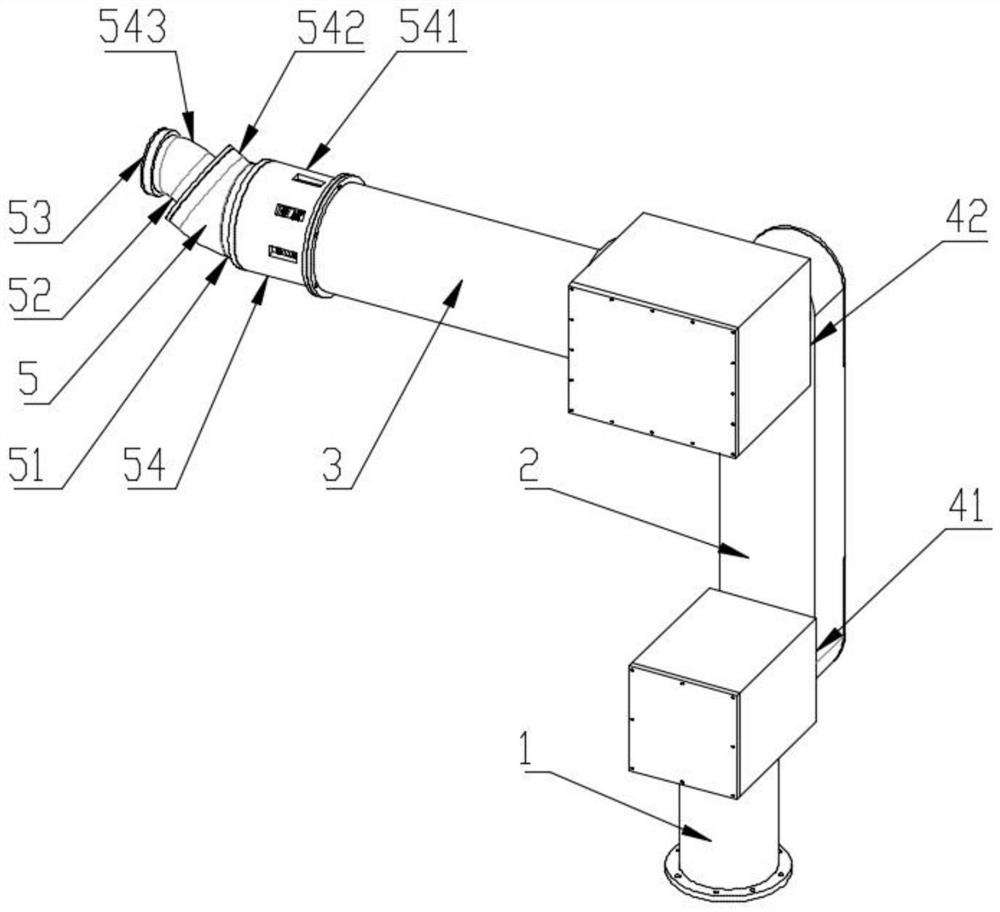
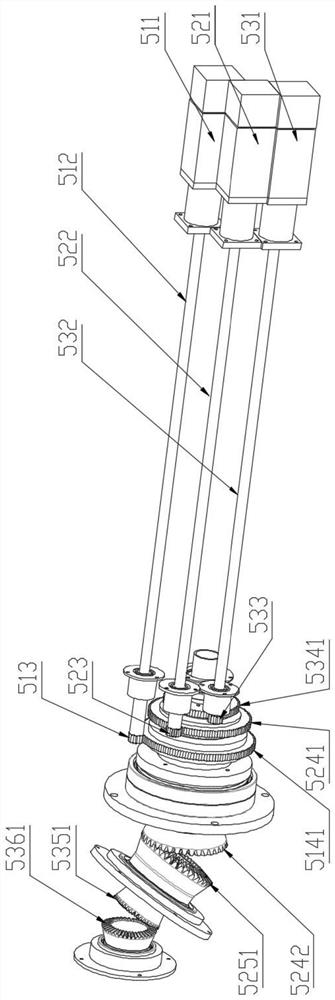
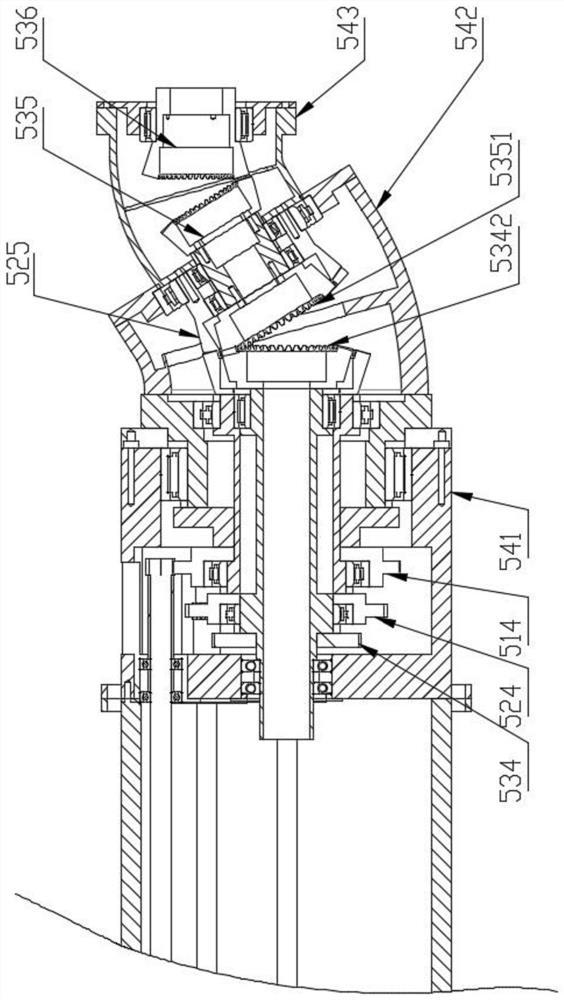
[0040] Such as Figure 1 ~ Figure 3 As shown, the structural relationship is as follows: the front end of the boom 2 is rotationally connected with the support 1 through the first connecting portion 41 to form a two-degree-of-freedom rotational pair, and the end is rotationally connected with the small arm 3 through the second connecting portion 42 to form The rotary joint with on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More