

Corrugated-pipe-shaped soft actuator and hand rehabilitation training device
A technology of actuators and bellows segments, which is applied in passive exercise equipment, physical therapy, etc., can solve problems such as distortion, easy lateral bending, and large overall size, and achieve avoidance of lateral disturbance, difficulty in lateral bending, and bending moment big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
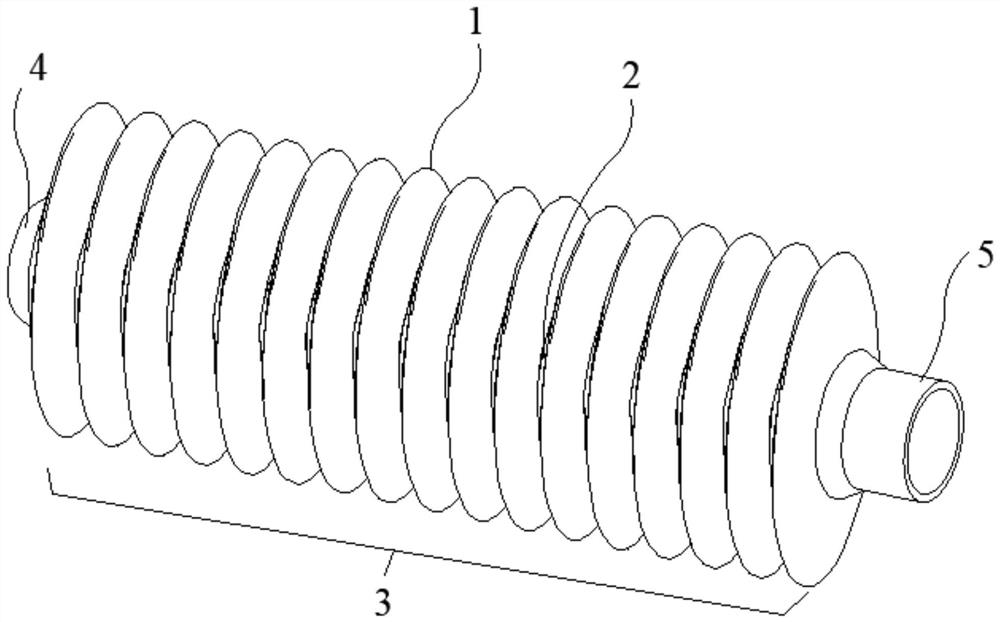
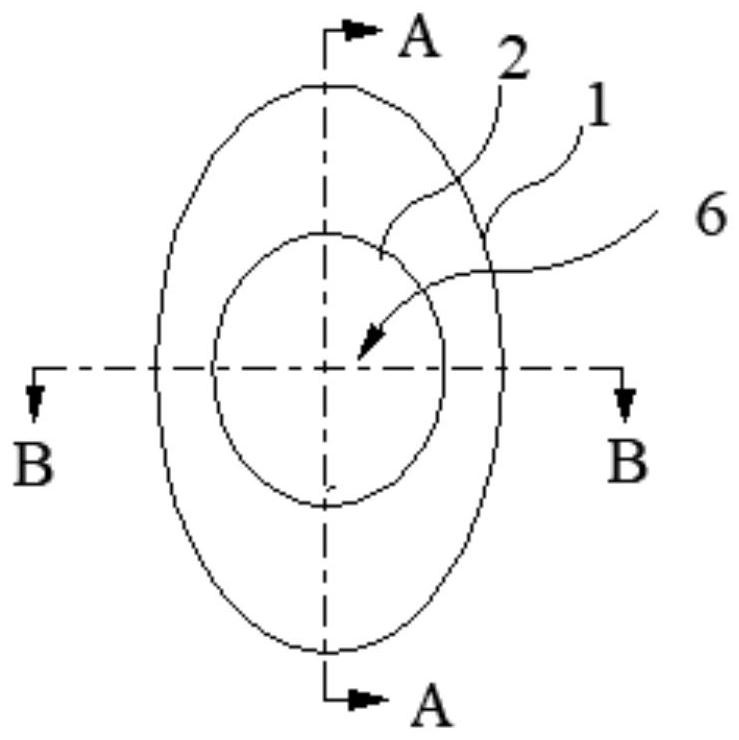
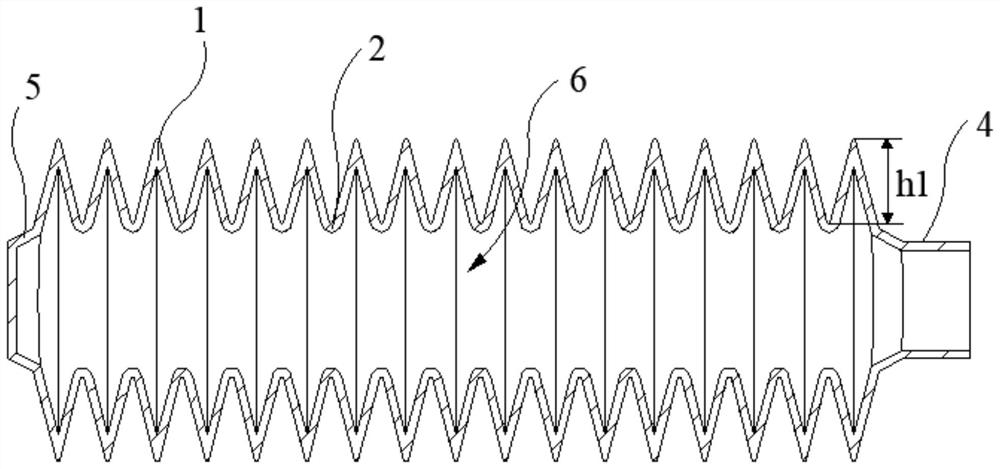
[0082] see Figure 1-Figure 4 , in order to solve the problems in the prior art that the equal-wave height bellows soft actuator is easy to bend laterally, twist, and have a large overall size, this embodiment provides a bellows-shaped soft actuator, wherein, figure 1 It is a schematic diagram of the three-dimensional structure of the bellows-shaped soft actuator of this embodiment, figure 2 is the projection in the axial direction of the outer contour of the crest structure and the outer contour of the trough structure of the bellows-shaped soft actuator in this embodiment, image 3 for along figure 2 The cross-sectional view of A-A direction in the middle; Figure 4 for along figure 2 The cross-sectional view of B-B direction in the middle.
[0083] see Figure 1-4 , in this embodiment, the bellows-shaped soft actuator is mainly composed of the first interface pipe section 4, the hollow bellows section 3 and the second interface pipe section 5 arranged in sequence, a...
Embodiment 2
[0091] see Figure 9-Figure 12 , this embodiment provides another bellows-shaped soft body actuator, wherein, Figure 9 It is a schematic three-dimensional structure diagram of the bellows-shaped soft body actuator of this embodiment, Figure 10 is the projection of the outer contour of the wave crest structure and the outer contour of the wave trough structure in the axial direction of the bellows-shaped soft body actuator of this embodiment, Figure 11 for the edge figure 2 Sectional view in the direction C-C; Figure 4 for the edge figure 2 Sectional view in D-D direction.
[0092] see Figure 9-Figure 12 , the bellows-shaped soft body actuator of this embodiment is a modified embodiment of the bellows-shaped soft body actuator of the first embodiment, which consists of a first interface pipe section 4, a hollow bellows section 3 and a second interface pipe section 5 arranged in sequence Structure, the bellows-shaped soft actuator is a left-right and up-down symmet...
Embodiment 3
[0095] see Figure 13-Figure 16 , this embodiment provides yet another bellows-shaped soft body actuator, wherein, Figure 13 It is a schematic three-dimensional structure diagram of the bellows-shaped soft body actuator of this embodiment, Figure 14 is the projection of the outer contour of the wave crest structure and the outer contour of the wave trough structure in the axial direction of the bellows-shaped soft body actuator of this embodiment, Figure 15 for the edge Figure 14 Sectional view in the direction of E-E; Figure 16 is along the Figure 14 Sectional view in the direction F-F.
[0096] see Figure 13-Figure 16 , the bellows-shaped soft body actuator of this embodiment is another modified embodiment of the bellows-shaped soft body actuator of the first embodiment, which consists of a first interface pipe section 4, a hollow bellows section 3 and a second interface pipe section arranged in sequence 5. The bellows-shaped soft actuator is a left-right and up-d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More