Rigidity modeling method for Cartesian space at tail end of parallel-serial robot
A technology of Cartesian space and modeling method, applied in the field of stiffness modeling of Cartesian space at the end of parallel hybrid robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Embodiments of the present application are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary, and are intended to explain the present application, and should not be construed as limiting the present application.
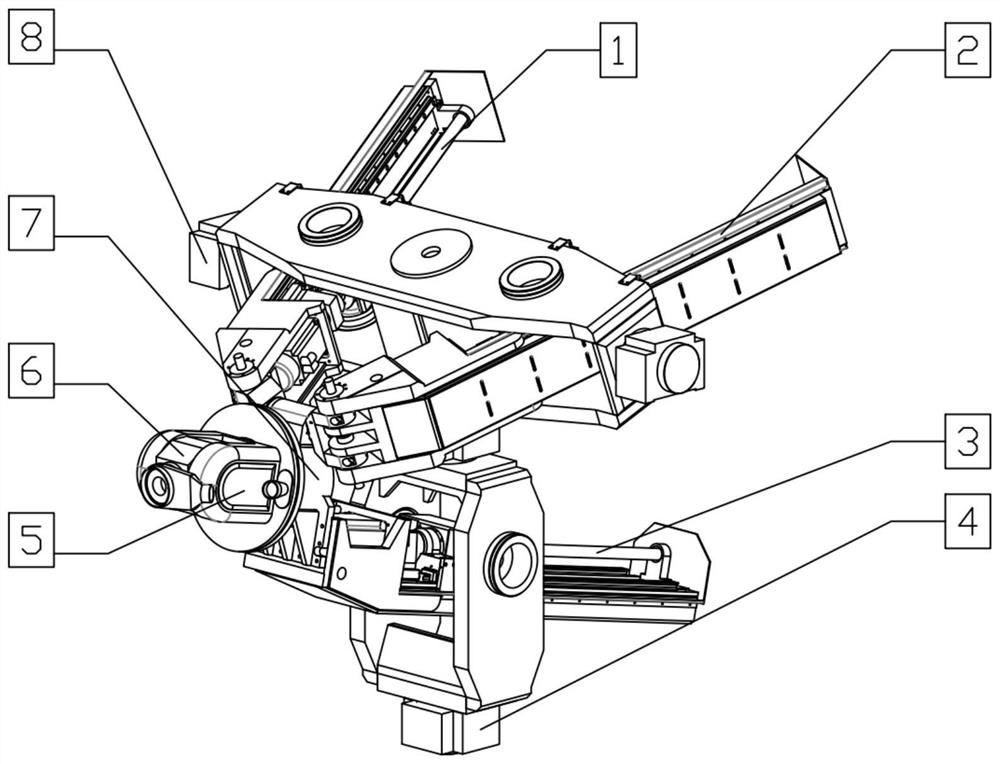
[0042] It should be noted that the parallel hybrid mechanism has attracted extensive attention from academia and industry because of its superiority in accuracy, stiffness, and dynamic performance over the series mechanism. Where high stiffness and fast dynamic response are required in applications such as high-speed machining, strong assembly, etc., the stiffness matrix at the end should always be considered, and the stiffness of the robot is a particularly important performance factor.
[0043] The terminal Cartesian space...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap