Multi-target tracking algorithm based on track management method
A multi-target tracking and track management technology, applied in navigation computing tools, navigation, mapping and navigation, etc., to solve problems such as false tracks that cannot maneuver targets, large differences in sensor sampling rates, and different monitoring areas.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, where the schematic embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
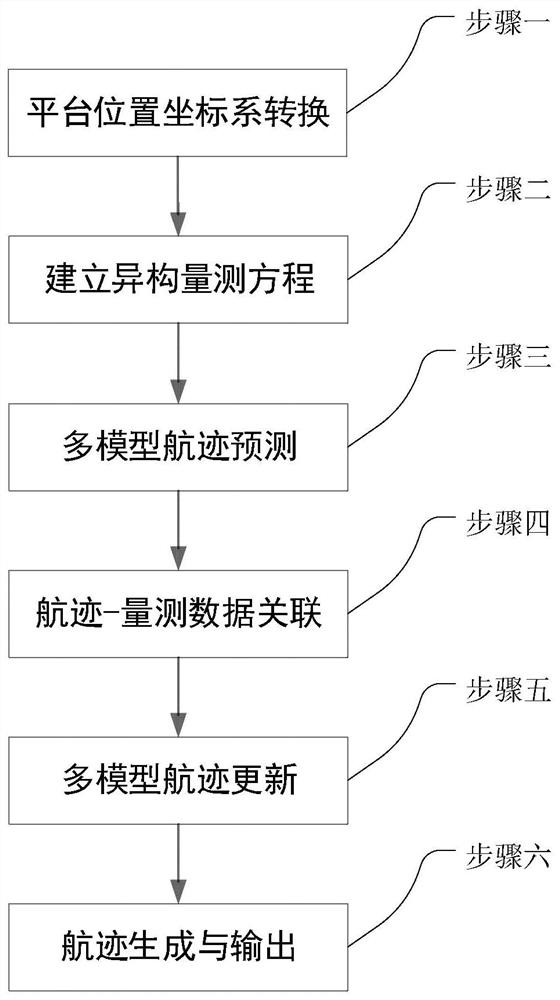
[0061] Such as figure 1 As shown, the embodiment of the present invention provides a multi-target tracking algorithm based on the track management method, including the following steps:
[0062] Step 1: Receive the multi-source sensor measurement data transmitted at the same time, and receive the measurement data for the first time as the track start; convert the positions of each sensor platform to the same northeast sky coordinate system;
[0063] Specifically include the following steps:
[0064] 11) Select a fixed point as the fusion node;
[0065] 12) Receive sensor measurement data, if the measurement data is received for the first time, start the track from the measurement data, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More