

Backstepping-based lower limb exoskeleton control method
A control method and exoskeleton technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems affecting the accuracy of disturbance approach and the effect of joint angle tracking, so as to achieve good approximation effect and reduce approximation The effect of high error and control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The technical solutions of the present invention will be described in detail below in conjunction with the drawings and embodiments, which are not intended to limit the protection scope of the present application.
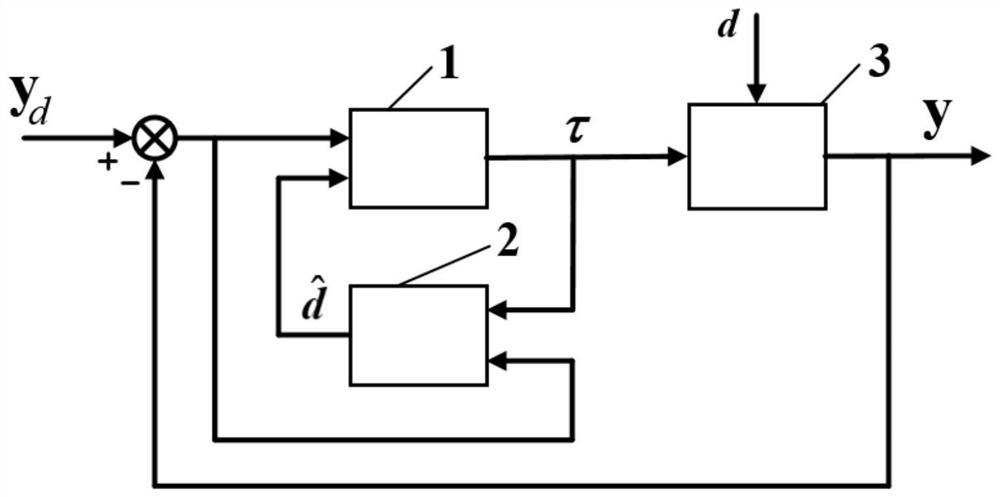
[0063] figure 1 It is the structural block diagram of the lower extremity exoskeleton control system based on RBF disturbance observer of the present invention, and control system comprises Backstepping controller 1, RBF disturbance observer 2 and lower extremity exoskeleton 3; External random disturbance d acts on lower extremity exoskeleton 3, joint desired angle y d Input to the Backstepping controller 1, and then output the joint torque τ, which is used to drive the movement of the lower extremity exoskeleton 3, and the joint desired angle y d Input the RBF disturbance observer 2 to observe the tracking effect of the joint angle; at the same time, the joint torque τ is input into the RBF disturbance observer 2, and the RBF disturbance observer 2 outputs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More