Unmanned ship course active-disturbance-rejection control system and control method thereof
A technology of active disturbance rejection control and unmanned boat, applied in control/regulation system, two-dimensional position/channel control, non-electric variable control, etc. The effect of strong interference ability, low precision requirements, and reducing the difficulty of tuning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
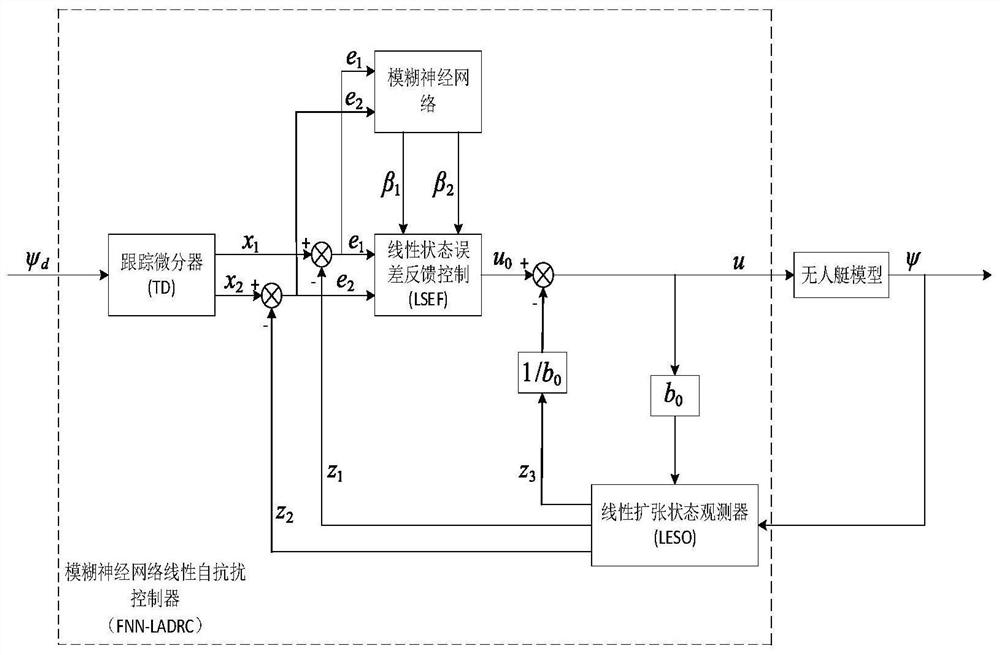
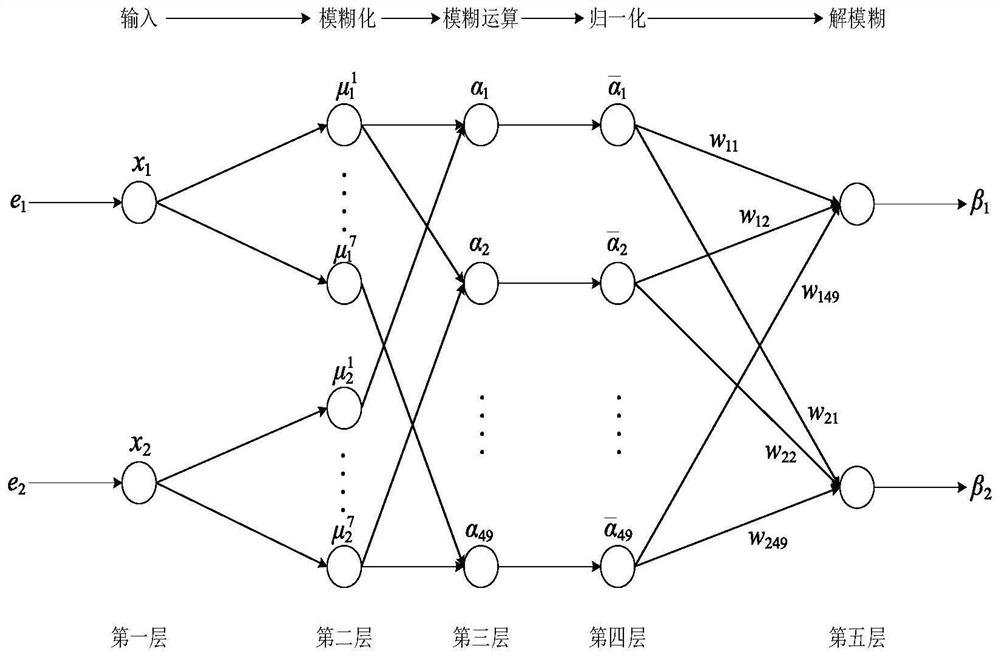
[0016] Such as figure 1 The schematic diagram of the structure of the unmanned ship course ADRR control system based on the fuzzy neural network is shown. Extended state observer (LESO), linear state error feedback (LSEF) and disturbance compensation modules, the structure of the fuzzy neural network module is as follows figure 2 As shown, this module is a fuzzy neural network based on the Mamdani model, which is a feed-forward network composed of 5 layers. The first layer to the fifth layer are: input layer, membership function generation layer, reasoning layer, normalization layer and output layer. The function of the input layer is to receive the input error and its differential signal. The function of the membership function generation layer is to realize the fuzzification of the input variables. The function of the reasoning l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com