

Frog-like amphibious robot and movement control method
A technology of robots and frogs, which is applied in the field of bionic robots, can solve problems such as electromechanical system drive joint coupling, increase the weight of limbs, and low movement efficiency, so as to achieve the effect of pitching attitude, solving kinematic coupling, and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
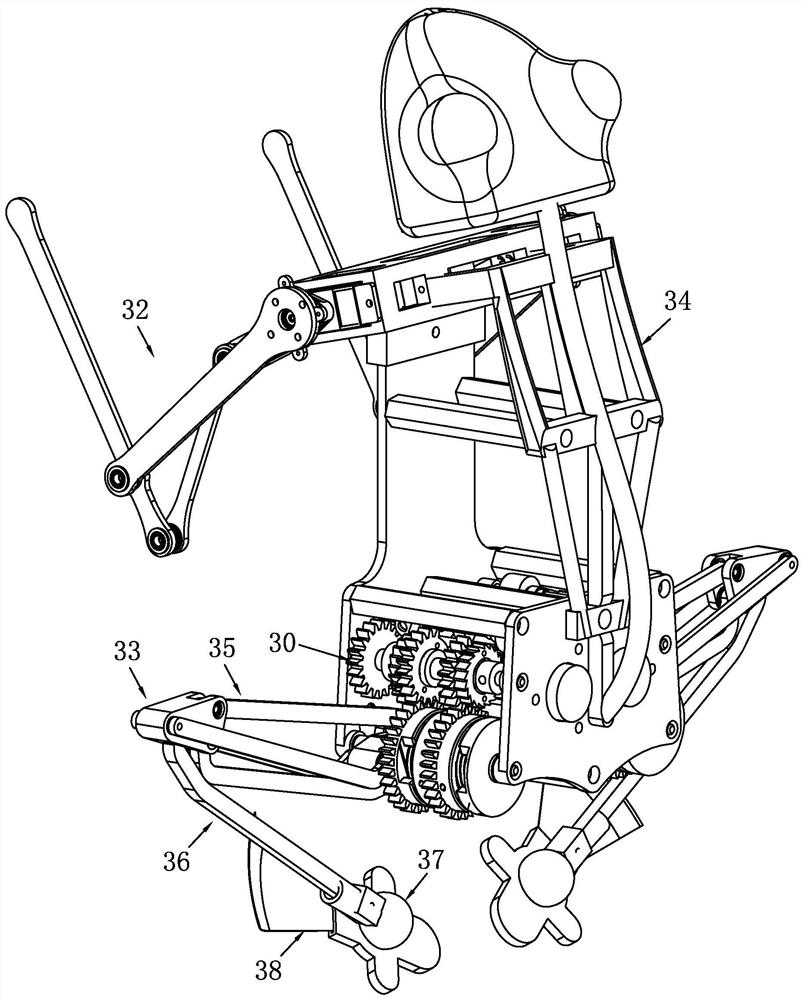
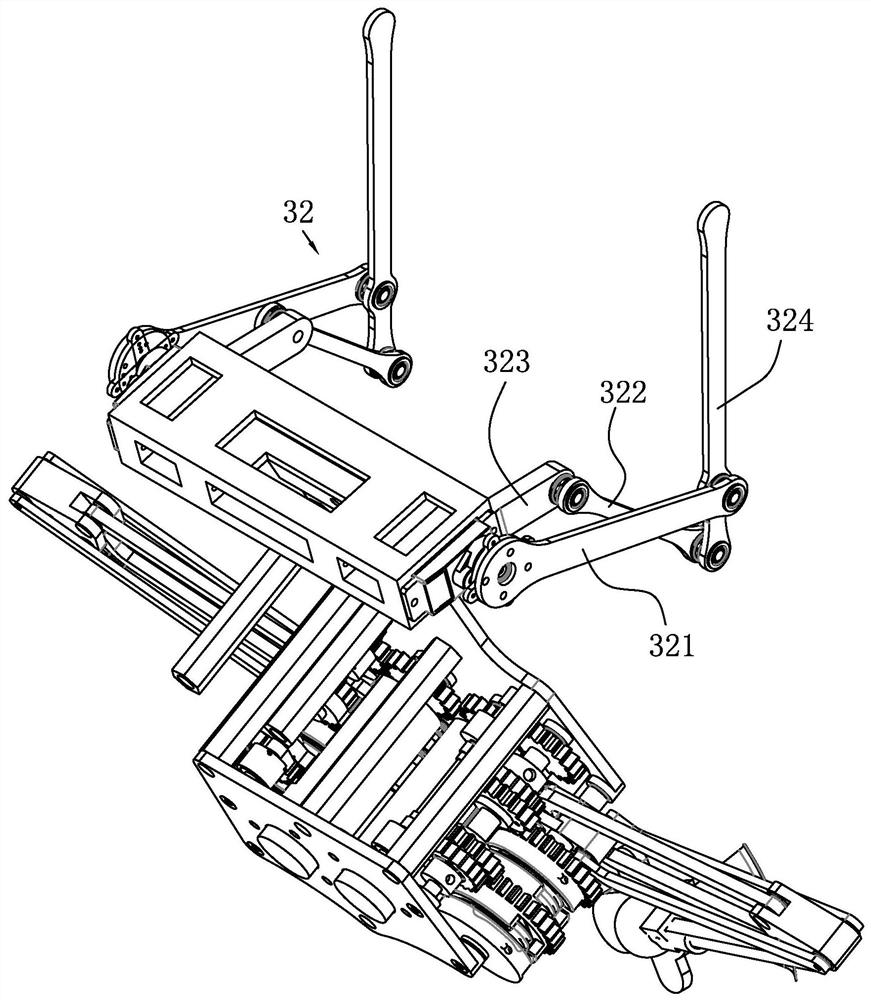
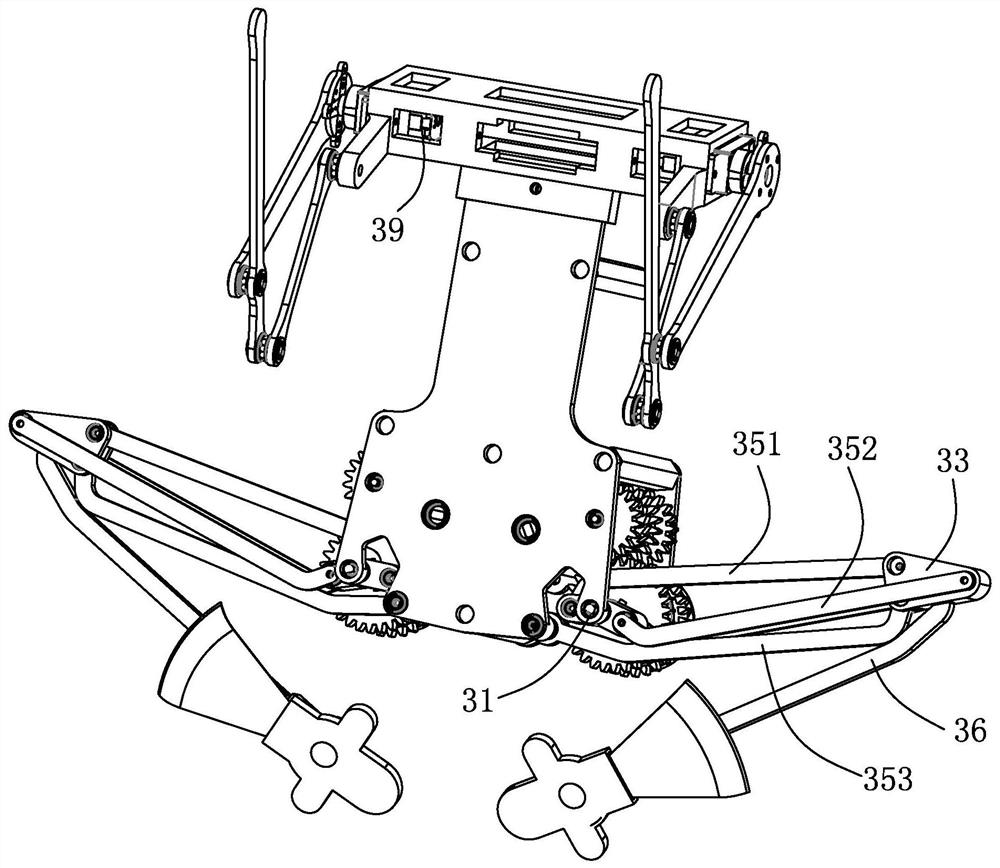
[0018] see figure 1 Shown, a kind of imitation frog amphibious robot comprises main body driving trunk 34, two thighs 35, two shanks 36, two hip joints 31, two knee joints 33, two ankle joints 37 and two flippers 38, the main body The driving trunk 34 is connected to the thigh 35 through the hip joint 31, the thigh 35 is connected to the calf 36 through the knee joint 33, and the calf 36 is connected to the flipper 38 through the ankle joint 37; it also includes two four-link forelimbs 32 and two sets of elastic energy storage release drives Mechanism 30; the four-link forelimb 32 is rotatably arranged on the main body driving trunk 34, and the power of the four-link forelimb 32 is provided by a driving source 39 arranged in the main body driving trunk 34, and the four-link forelimb 32 realizes pitching through the shoulder-elbow joint and stretching action, the power of the hip joint 31 is provided by the elastic energy storage and release drive mechanism 30 arranged in the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More