

Visual positioning hardware-in-the-loop simulation platform and simulation method
A visual positioning and simulation platform technology, applied in the direction of instruments, control/adjustment systems, simulators, etc., can solve problems such as the inability to evaluate the impact of the visual positioning system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
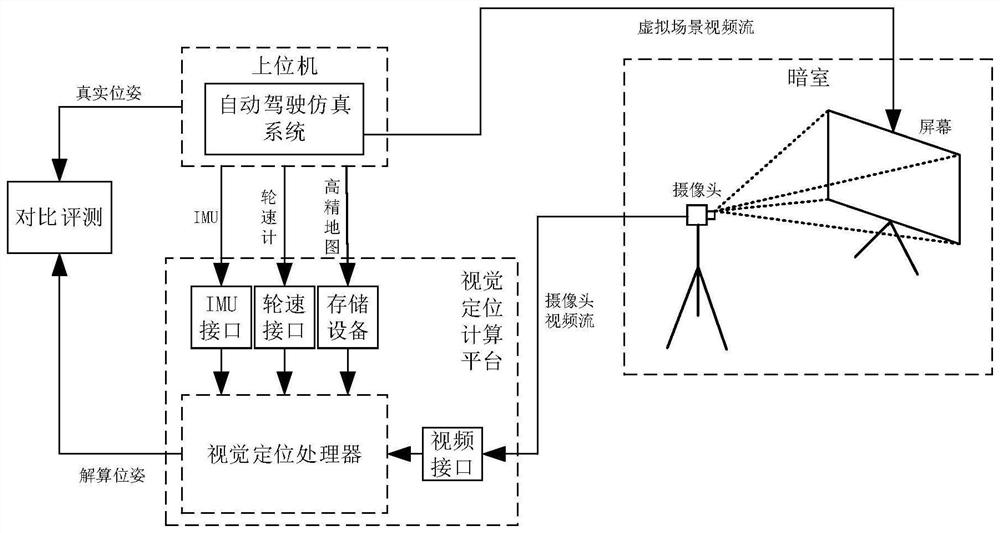
[0037] Such as figure 1 As shown, a visual positioning hardware-in-the-loop simulation platform mainly includes three parts, namely, an automatic driving simulation system, a darkroom scene system, and a visual positioning system. Among them, the visual positioning system includes a visual positioning computing platform and a camera. The visual positioning computing platform is equipped with visual positioning algorithm software. The visual positioning computing platform and the camera are added to the simulation system as the visual positioning system hardware. The visual positioning computing platform communicates with The automatic driving simulation system is connected for data interaction; the dark room scene system includes a dark room, where a high-definition display screen and a camera actually used in the visual positioning system are placed. In front of the screen, the camera collects the video displayed on the high-definition display screen of the automatic driving ...
Embodiment 2
[0044] A simulation method for visually positioning a hardware-in-the-loop simulation platform, comprising the following steps:
[0045] The visual positioning computing platform obtains the high-precision map of the virtual scene from the automatic driving simulation system;
[0046] The visual positioning computing platform obtains IMU and wheel speed data from the automatic driving simulation system through the data interface;
[0047] The automatic driving simulation system displays the virtual scene in front of the vehicle through the high-definition display screen in the dark room scene system;
[0048] The camera collects the video displayed on the high-definition display screen of the automatic driving simulation system in real time;
[0049] The visual positioning computing platform relies on the real-time camera video stream to extract features, compares it with the high-precision map in the automatic driving simulation system, and integrates IMU and wheel speed dat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More