

Three-dimensional reconstruction point cloud error compensation method and system based on stereoscopic vision
A technology of stereo vision and 3D reconstruction, applied in the fields of 3D vision, non-contact measurement and reverse engineering, can solve the problems of affecting the reconstruction accuracy, large point cloud model, existing errors, etc., to achieve good fitting effect, strong fitting ability, The effect of error prediction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
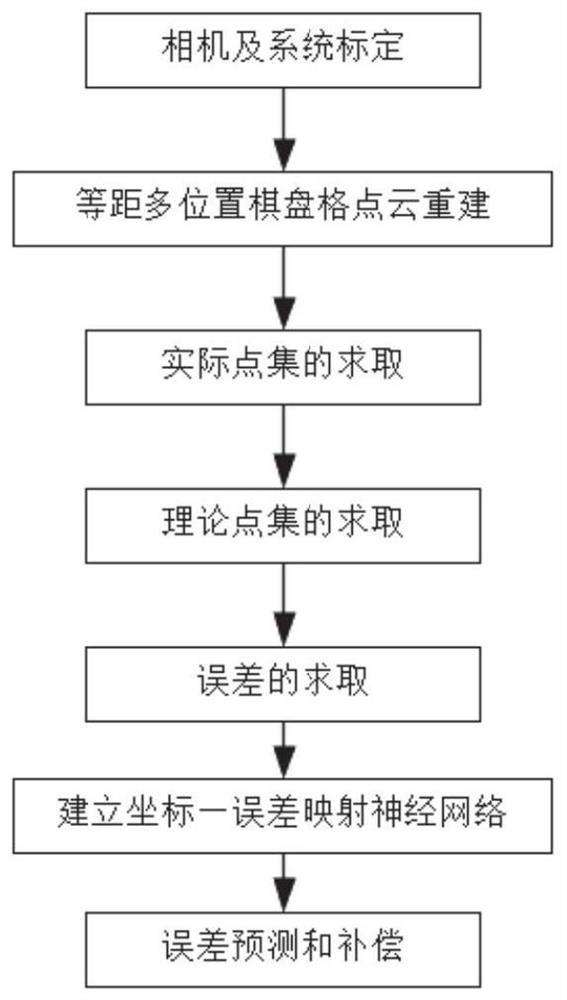
[0043] Such as figure 1 As shown, this embodiment discloses a point cloud error compensation method for three-dimensional reconstruction based on stereo vision, including:
[0044] Step 1: Camera and system calibration. The camera and system are calibrated by high-precision checkerboard and Zhang's calibration method, and the external parameters of the space between the cameras and the internal parameters of the two cameras are obtained.
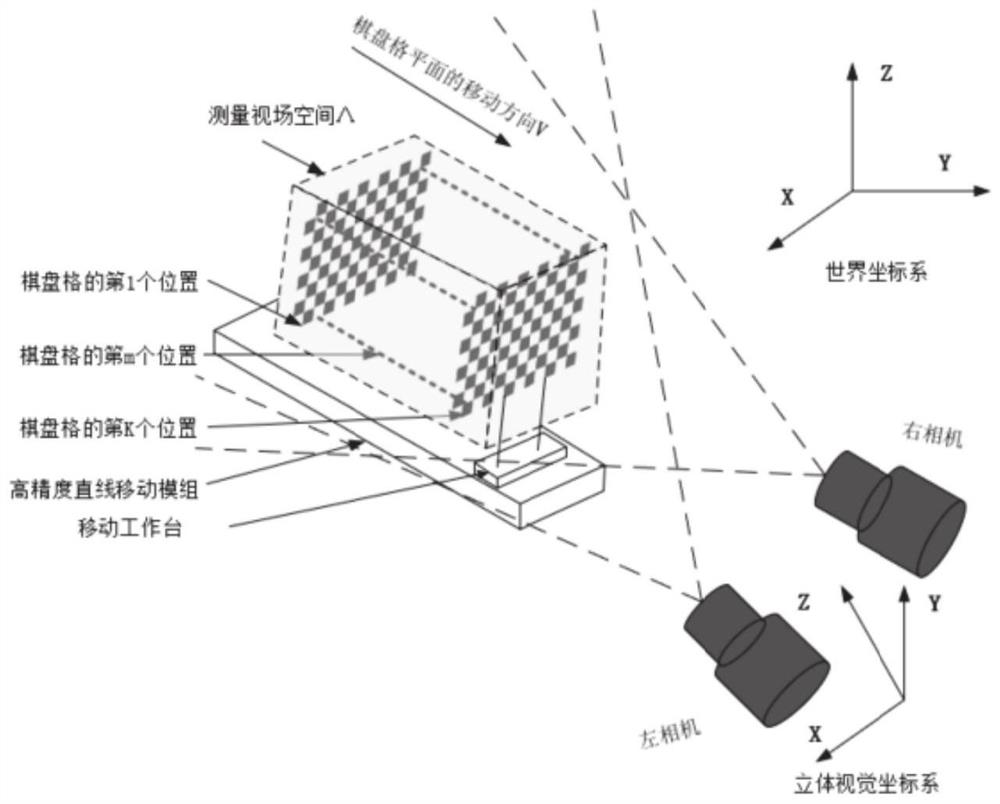
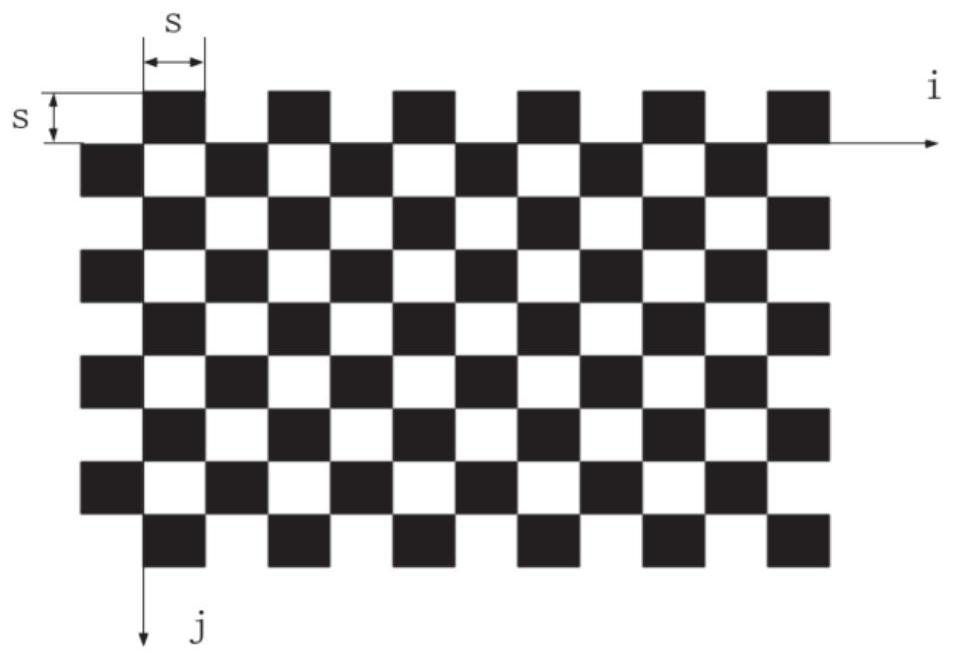
[0045] Step 2: Isometric multi-position checkerboard point cloud reconstruction. First, establish a two-dimensional checkerboard coordinate system and mark the inner corners of the checkerboard; use a stereo vision camera to simultaneously collect calibration board pictures, and use stereo vision technology to reconstruct the 3D point cloud coordinates of the checkerboard inner corners at this position; use a high-precision mobile module Drive the checkerboard image to move k times at equal intervals, and use the external parameters betwee...
Embodiment 2
[0086] The purpose of this embodiment is to provide a computing device, including a memory, a processor, and a computer program stored on the memory and operable on the processor. When the processor executes the program, the steps of the above method are implemented, including:
Embodiment 3
[0088] The purpose of this embodiment is to provide a computer-readable storage medium.
[0089] A computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the steps of the above-mentioned method are executed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More