

Adjustable and deformable clamping arm for industrial robot
An industrial robot and adjustable technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of being unable to effectively accommodate various clamping requirements, and the clamping arm equipment is too single, so as to achieve rich functions and avoid exceeding the scope , the effect of reducing the use of power sources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0036] The specific implementation of the present invention will be described in detail below in conjunction with specific embodiments.
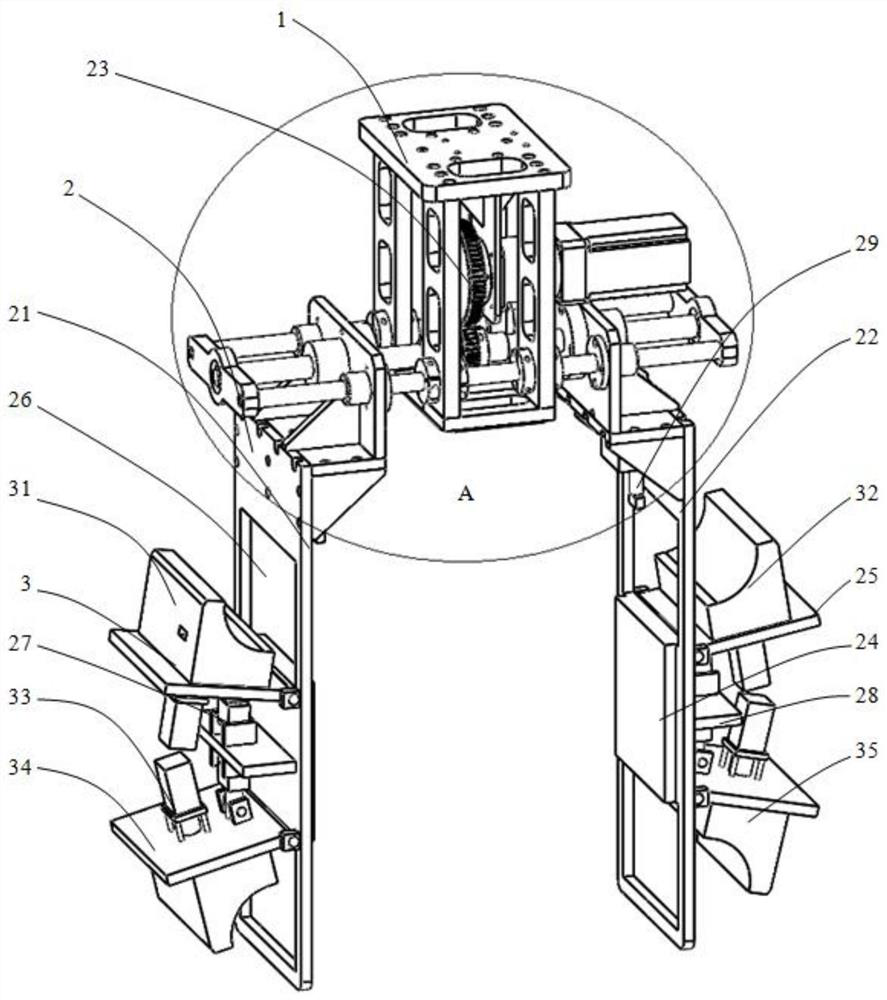
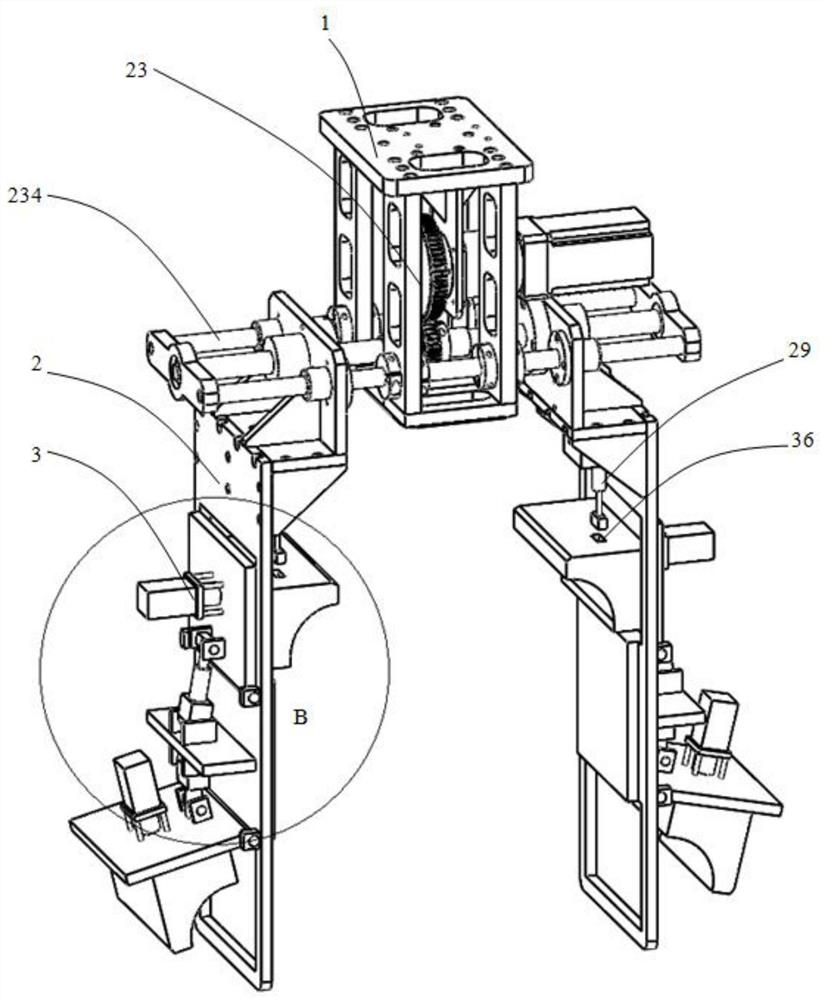
[0037] Such as Figure 1~2 As shown, they are schematic diagrams of two different state structures of an adjustable and deformable clamping arm for an industrial robot provided by an embodiment of the present invention. holding arm, the holding arm includes:
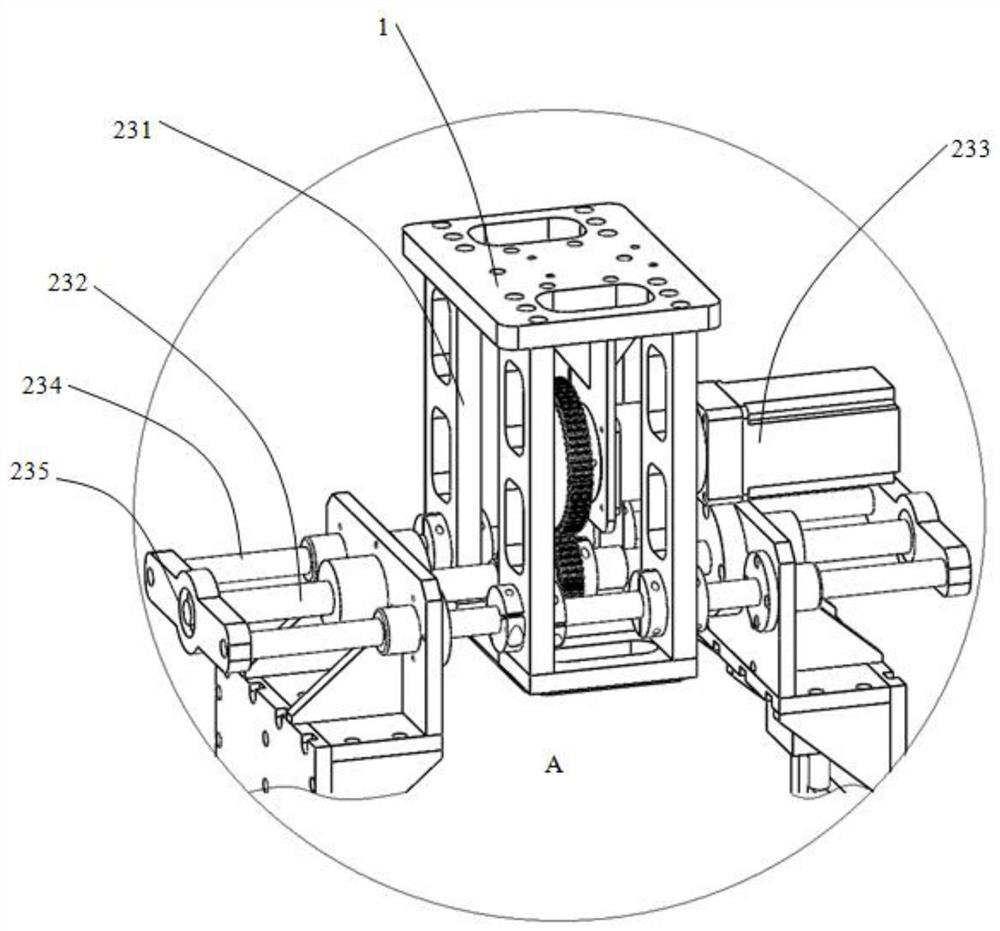
[0038] Mounting seat 1, the mounting seat 1 can be connected with the joint end of the industrial robot;
[0039] The first clamping assembly 2, the first clamping assembly 2 includes a first clamping part...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More