

Photovoltaic cell string positioning method based on robot
A photovoltaic cell and positioning method technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of different sizes and cannot meet the needs of flexible production, so as to improve production flexibility, solve the problem of inconsistency in size, and reduce the use of cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] In order to make the techniques, creative features, objective and efficacy of the present invention, and is further illustrated below.
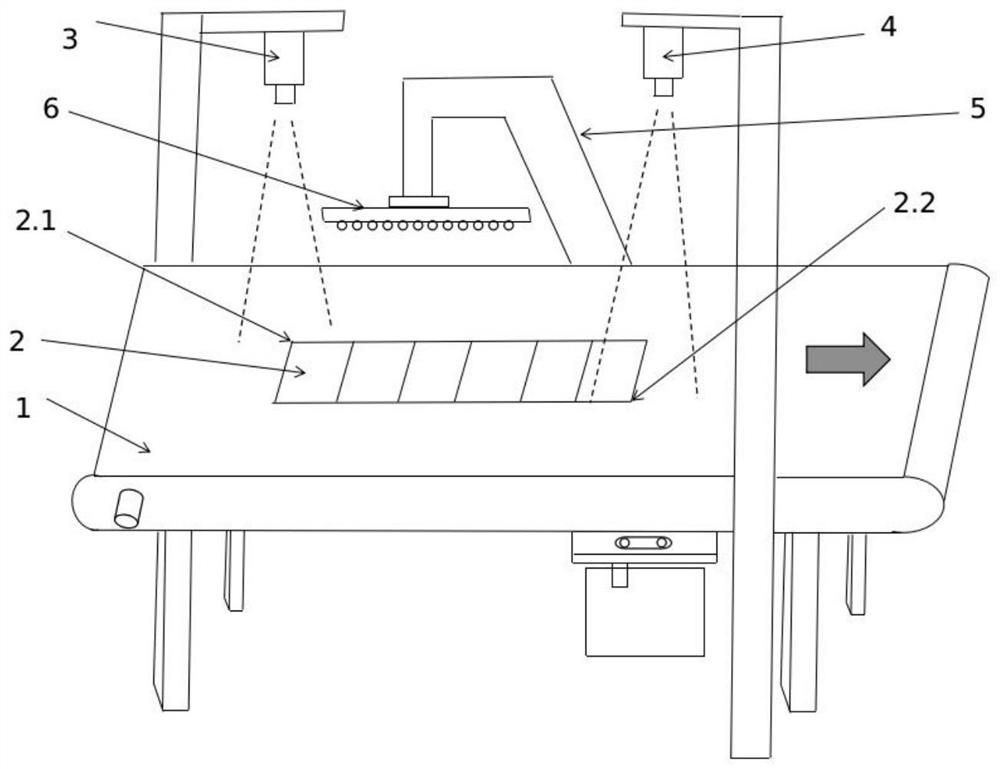
[0037] Such as Figure 1 to 5 As shown, a robot based photovoltaic battery string positioning method, the specific steps are as follows:
[0038] S1, build implementation platform: Construction implementation platform ensures that the camera one 3 and the camera two 4 acquire the diagonal position of the photovoltaic battery string 2, respectively;
[0039] S2, hand-eye calibration relationship: camera one 3 with robot 5's hand-eye calibration relationship is A 1 (R 1 , T 1 ), Camera two 4 and robot 5's hand-eye calibration relationship is A 2 (R 2 , T 2 );
[0040] S3, place a photovoltaic battery string 2 on the conveyor belt 1 and considered to be a standard photovoltaic battery string;
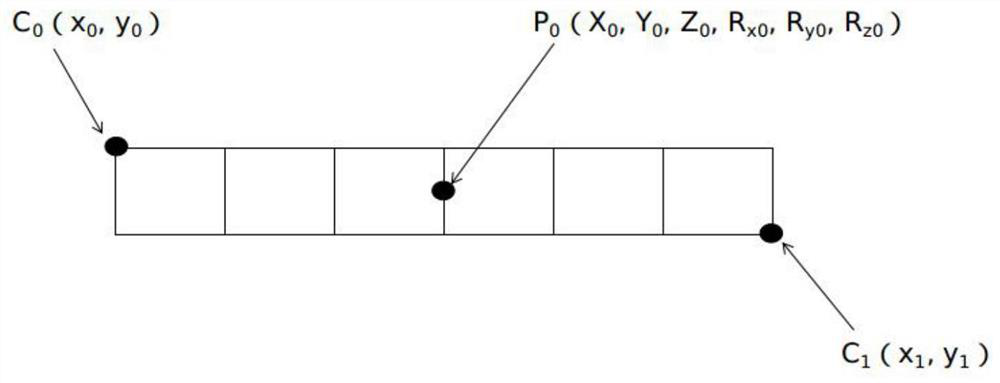
[0041] S4, angular point position: Corner position of the camera one 3 is c 0 (x 0 Y 0 ), The angular position of the camera two 4 is c 1 (x 1 Y 1 Acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More